Linear variable differential transformer
The linear variable differential transformer (LVDT) (also called linear variable displacement transformer,[1] linear variable displacement transducer, [2] or simply differential transformer[3]) is a type of electrical transformer used for measuring linear displacement (position). A counterpart to this device that is used for measuring rotary displacement is called a rotary variable differential transformer (RVDT).
Introduction
LVDTs are robust, absolute linear position/displacement transducers; inherently frictionless, they have a virtually infinite cycle life when properly used. As AC operated LVDTs do not contain any electronics, they can be designed to operate at cryogenic temperatures or up to 1200 °F (650 °C), in harsh environments, and under high vibration and shock levels. LVDTs have been widely used in applications such as power turbines, hydraulics, automation, aircraft, satellites, nuclear reactors, and many others. These transducers have low hysteresis and excellent repeatability.
The LVDT converts a position or linear displacement from a mechanical reference (zero or null position) into a proportional electrical signal containing phase (for direction) and amplitude (for distance) information. The LVDT operation does not require an electrical contact between the moving part (probe or core assembly) and the coil assembly, but instead relies on electromagnetic coupling.
Operation
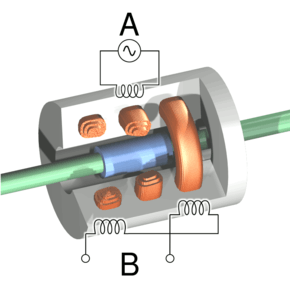
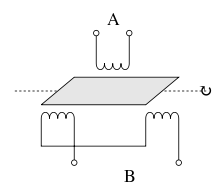
The linear variable differential transformer has three solenoidal coils placed end-to-end around a tube. The center coil is the primary, and the two outer coils are the top and bottom secondaries. A cylindrical ferromagnetic core, attached to the object whose position is to be measured, slides along the axis of the tube. An alternating current drives the primary and causes a voltage to be induced in each secondary proportional to the length of the core linking to the secondary.[3] The frequency is usually in the range 1 to 10 kHz.
As the core moves, the primary's linkage to the two secondary coils changes and causes the induced voltages to change. The coils are connected so that the output voltage is the difference (hence "differential") between the top secondary voltage and the bottom secondary voltage. When the core is in its central position, equidistant between the two secondaries, equal voltages are induced in the two secondary coils, but the two signals cancel, so the output voltage is theoretically zero. In practice minor variations in the way in which the primary is coupled to each secondary means that a small voltage is output when the core is central.[4]
This small residual voltage is due to phase shift and is often called quadrature error. It is a nuisance in closed loop control systems as it can result in oscillation about the null point, and may be unacceptable in simple measurement applications too. It is a consequence of using synchronous demodulation, with direct subtraction of the secondary voltages at AC. Modern systems, particularly those involving safety, require fault detection of the LVDT, and the normal method is to demodulate each secondary separately, using precision half wave or full wave rectifiers, based on op-amps, and compute the difference by subtracting the DC signals. Because, for constant excitation voltage, the sum of the two secondary voltages is almost constant throughout the operating stroke of the LVDT, its value remains within a small window and can be monitored such that any internal failures of the LVDT will cause the sum voltage to deviate from its limits and be rapidly detected, causing a fault to be indicated. There is no quadrature error with this scheme, and the position-dependent difference voltage passes smoothly through zero at the null point.
Where digital processing in the form of a microprocessor or FPGA is available in the system, it is customary for the processing device to carry out the fault detection, and possibly ratiometric [5] processing to improve accuracy, by dividing the difference in secondary voltages by the sum of the secondary voltages, to make the measurement independent of the exact amplitude of the excitation signal. If sufficient digital processing capacity is available, it is becoming commonplace to use this to generate the sinusoidal excitation via a DAC and possibly also perform the secondary demodulation via a multiplexed ADC.
When the core is displaced toward the top, the voltage in top secondary coil increases as the voltage in the bottom decreases. The resulting output voltage increases from zero. This voltage is in phase with the primary voltage. When the core moves in the other direction, the output voltage also increases from zero, but its phase is opposite to that of the primary. The phase of the output voltage determines the direction of the displacement (up or down) and amplitude indicates the amount of displacement. A synchronous detector can determine a signed output voltage that relates to the displacement.
The LVDT is designed with long slender coils to make the output voltage essentially linear over displacement up to several inches (several hundred millimetres) long.
The LVDT can be used as an absolute position sensor. Even if the power is switched off, on restarting it, the LVDT shows the same measurement, and no positional information is lost. Its biggest advantages are repeatability and reproducibility once it is properly configured. Also, apart from the uni-axial linear motion of the core, any other movements such as the rotation of the core around the axis will not affect its measurements.
Because the sliding core does not touch the inside of the tube, it can move without friction, making the LVDT a highly reliable device. The absence of any sliding or rotating contacts allows the LVDT to be completely sealed against the environment.
LVDTs are commonly used for position feedback in servomechanisms, and for automated measurement in machine tools and many other industrial and scientific applications.
LVDT Types[6]
In terms of their shaft/armature construction three basic LVDT type varieties available:
- Free (Unguided) Armature LVDTs - The shaft or armature is free to slide back and forth in the LVDT body. It is not fastened to it, nor does it have any force acting on it within the LVDT itself. The armature is connected to the object under test, which moves in parallel with the LVDT body. The result is a frictionless arrangement, resulting in a very long life span for the sensor. Proper alignment is required to achieve the best results. This type of LVDT is ideal for short-range, high-speed applications (e.g., vibration). It is also ideal when a high number of cycles will be observed. It works best when the object under test is moving in parallel with the LVDT body.
- Captive (Guided) Armature LVDTs - The armature is connected both to the body and the object under test. The armature is guided by a low-friction bearing assembly that restrains it. This allows the LVDT to handle longer measurement ranges (e.g., ~25 mm to 45 cm [~0.5 to 18 in.]), as well as scenarios when the object under test is moving transversely to the LVDT body. In these cases, misalignment would occur if the armature were not guided. This type of LVDTs are useful in both static and dynamic measurement applications.
- Forced or Spring-extended Armature LVDTs - This LVDT type has the same low-friction bearing assembly of a captive (guided) LVDT, but in addition, it uses a mechanical return mechanism like a spring, pneumatics, or a motor to lightly push the armature out to its full deflection. This is for applications where it is desired that the LVDT armature maintain a steady connection with the object under test. These LVDTs are best for static and slow-moving applications.
See also
- Dot convention
- Linear encoder
- Rotary encoder
References
- https://www.google.com/patents/US4149409
- http://www.omega.com/manuals/manualpdf/M1120.pdf
- Baumeister & Marks 1967, pp. 16–8
- https://teachics.org/2019/sensor-and-transducers-m1/lvdt-linear-variable-differential-transformer/
- Arun T Vemuri; Matthew Sullivan (2016). "Ratiometric measurements in the context of LVDT-sensor signal conditioning" (PDF). Texas Instruments Industrial Analog Applications Journal. Retrieved 27 October 2017.
- "Measure Position/Displacement With LVDT Sensors | Dewesoft". dewesoft.com. Retrieved 2020-08-12.
- Baumeister, Theodore; Marks, Lionel S., eds. (1967), Standard Handbook for Mechanical Engineers (Seventh ed.), McGraw-Hill, LCCN 16-12915
External links
- How LVDTs Work (interactive)
- How LVDTs Work
- Phasing Explanation
- LVDT models and applications
- Analog Devices AD598 datasheet
- http://www.meas-spec.com/downloads/LVDT_Selection,_Handling_and_Installation_Guidelines.pdf LVDT selection, handling and installation guidelines; describes parameters that are significant in the application of LVDTs
- http://www.meas-spec.com/downloads/Principles_of_the_LVDT.pdf The LVDT: construction and principle of operation
- http://www.meas-spec.com/downloads/LVDT_Technology.pdf March 2013; pictures of internal construction; cross-axis rejection, shielding, corrosion issues