Dextre
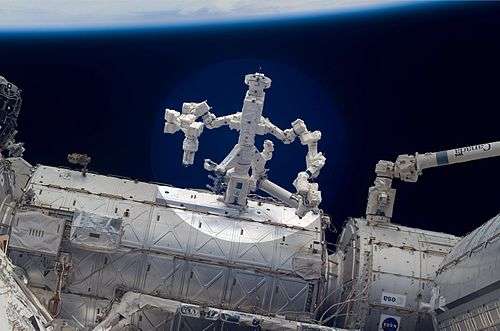
Dextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and does repairs otherwise requiring spacewalks. It was launched March 11, 2008 on mission STS-123.
 Dextre, many of the ISS's Robotic arms and experiments, can be operated from Earth, performing tasks while the crew sleeps. | |
| Operator | NASA |
|---|---|
| Manufacturer | MDA Space Missions |
| Instrument type | telemanipulator |
| Website | www |
| Properties | |
| Mass | 1,662 kg (3,664 lb) |
| Dimensions | 3.5 m (11 ft) |
| Number launched | 1 |
| Host spacecraft | |
| Spacecraft | International Space Station |
| Operator | |
| Launch date | March 11, 2008 |
| Rocket | Space Shuttle |
| Launch site | Kennedy LC-39A |



Dextre is part of Canada's contribution to the ISS and is named to represent its dexterous nature. Dextre is the third Canadian robotic arm used on the ISS, preceded by the Space Shuttle's Canadarm and the large Canadarm2. Dextre was designed and manufactured by MacDonald Dettwiler (MDA).[1]
In the early morning of February 4, 2011, Dextre completed its first official assignment which consisted of unpacking two pieces for Kounotori 2 while the on-board crew was sleeping.[2]
Purpose
Dextre is designed to handle orbital replacement units: Many spares are stored on the ISS and Dextre is able to carry them to and from worksites and install replacements when failures occur. Before Dextre arrived astronauts were required to perform space walks to carry out this work.
Structure
Dextre resembles a gigantic torso fitted with two extremely agile, 3.5 metres (11 ft) arms. Total mass is about 1,662 kilograms (3,664 lb).[3] The 3.5-metre-long body[3] pivots at the "waist". The body has a Power Data grapple fixture at the 'head' end that can be grasped by the larger Space Station Arm, Canadarm2 so that Dextre can be positioned at the various Orbital Replacement Unit (ORU) worksites around the Space Station. The other end of the body has a Latching End Effector virtually identical to that of Canadarm2, so that Dextre can also be attached to Space Station grapple fixtures or the Mobile Base System.
Dextre can also be operated whilst it is attached to the end of Canadarm2.[4]
Each arm is somewhat like a shortened Canadarm2 (in that it has 7 joints) but is fixed to Dextre at one end.
At the end of Dextre's arms are ORU/Tool Changeout Mechanisms (OTCM). The OTCM has built-in grasping jaws, a retractable socket drive, a monochrome TV camera, lights, and an umbilical connector that can provide power, data, and video to/from a payload.[5]
Dextre moves one arm at a time, while one arm may hold onto the station (using specially provided standard H or Micro interfaces[6]:5.1) for stability and ease of control[6]:2.1 the other is available to perform tasks.
Tools
The lower body of Dextre has a pair of orientable colour TV cameras with lights, a platform for stowing ORUs, and a tool holster. The tool holster is equipped with two Robotic Micro Conical Tools (RMCTs), which allow an arm to grasp additional types of ORU fixtures. The Socket Extension Tool (SET) extends the length of the grasping socket on an arm, and the Robotic Off-Set Tool (ROST) allows an arm to grasp difficult to reach targets. [7]
Several new tools were added as part of the 2011 Robotic Refueling Mission. A Wire Cutter, Safety Cap Removal Tool, EVR Nozzle Tool and a Multifunction Tool with several adapters. These tools are not installed on Dextre but are used by Dextre when performing RRM operations. The tools are not considered a part of Dextre's complement of tools and are stowed on the RRM platform.
In 2013 the H-II Transport Vehicle brought the RRM On-orbit Transfer Cage (ROTC), which is a sliding table within the Japanese airlock platform from which to retrieve and subsequently install new hardware.[8]
Robotic Refueling Mission — Phase 2 will use the Visual Inspection Poseable Invertebrate Robot (VIPIR) borescope camera with a 34 inch long flexible tube.[9]
Future possibilities
SARAH (Self-Adaptive Robotic Auxiliary Hand) is a three fingered hand that is designed to attach to the end of Dextre's arm. It has not been delivered to the ISS.[6]
Design and delivery
Dextre was designed and manufactured by MDA Space Missions as part of the $200-million contracted by the Canadian Space Agency, which will oversee its future operations and the necessary training of station crews.[10]
It completed all necessary testing and was delivered to the Kennedy Space Center (KSC) in Florida, in mid-June 2007. Once at KSC, it underwent flight verification testing followed by shuttle integration.
Installation
Dextre was launched to the ISS on March 11, 2008 aboard Space Shuttle Endeavour on mission STS-123. It "woke up" and activated heaters needed for keeping its joints and electronics warm after receiving power from the space station's Canadarm2 on March 14. During the mission's second spacewalk on March 16, spacewalking astronauts attached the two 3.35-metre (11.0 ft) arms to the robot's main body and further prepared the machine for its handyman job on the station. After the spacewalk, crew members hooked Dextre back up to the station's robotic arm to keep it warm and to allow NASA to perform tests to ensure all of Dextre's electronics were working properly. Later that day, the crew tested all of its joints and brakes.[11] Astronauts finished outfitting the robot during a third spacewalk on March 17, 2008.[12]
Operation use
After testing and trials the first use planned in the removal and replacement of the RPCM (Remote Power Control Module) in 2009.[4]
Additional usage
In early August 2004 NASA declared its intention to use Dextre (or a close copy of it) as the robotic component for the Hubble Space Telescope rescue mission. Months after awarding a contract to MDA Space Missions to provide an SPDM copy for the Hubble repair mission,[13] NASA then canceled the mission in favour of flying a Shuttle mission to perform the repairs/upgrades. NASA cited excessive risks and new-found confidence in the Space Shuttle external tank as reasons for the cancellation.
Dextre was the subject of an April Fool's Day joke article on April 1, 2008 on NASA's APOD website.[14]
Dextre was also featured in the new $5 Canadian Polymer bank note together with Canadarm2, which Commander Chris Hadfield helped reveal aboard the International Space Station.[15]
See also
- Canadarm, which was used on the Space Shuttle
- Mobile Servicing System (MSS), also known by its primary component the Canadarm2, used on the ISS
- European Robotic Arm, A fourth robotic arm to be installed on the ISS in 2017
- The Japanese Remote Manipulator System, used on the ISS JEM module Kibo
- Strela, a manually operated crane used on the ROS to perform similar tasks as the Mobile Servicing System
References
- CanWest News Service, '"Canada Hand" successfully installed' Archived 2014-03-26 at the Wayback Machine, 15 March 2006
- Dextre Successfully Completes Its First Official Job, NASA, 2011-02-04
- "Dextre | NASA". Nasa.gov. 2013-10-18. Retrieved 2016-05-30.
- ISS preparing for debuts of Canada's Dextre operations and Japan's HTV. Apr 2009
- Which term?. "uro tool changeout mechanism [1 record] - TERMIUM Plus® — Search - TERMIUM Plus®". Btb.termiumplus.gc.ca. Retrieved 2016-05-30.
- "Archived copy of SARAH Hand Used for Space Operations on STVF Robot" (PDF). Archived from the original (PDF) on November 1, 2014. Retrieved November 1, 2014.
- Pete Harding (2011-09-04). "Canada's Dextre Completes Marathon Week of Robotics Ops on ISS". NASASpaceFlight.com. Retrieved 2016-05-30.
- "ISS Utilization: RRM - Satellite Missions - eoPortal Directory". Directory.eoportal.org. Retrieved 2016-05-30.
- "Satellite Servicing Capabilities Office". Ssco.gsfc.nasa.gov. Retrieved 2016-05-30.
- "Space station's Dextre grounded after power issue discovered - Technology & Science - CBC News". Cbc.ca. Retrieved 2016-05-30.
- "Spacewalkers resort to banging, pry bar". Associated Press. March 16, 2008. Archived from the original on 2008-03-19. Retrieved 2008-03-17.
- "Astronauts outfit robot with tool belt, cameras". CNN.com. Associated Press. 2008-03-18. Archived from the original on 2008-03-19. Retrieved 2008-03-18.
- MDA Space Missions official site Archived 2008-03-18 at the Wayback Machine
- Nemiroff, R.; Bonnell, J., eds. (1 April 2008). "New Space Station Robot Asks to be Called "Dextre the Magnificent"". Astronomy Picture of the Day. NASA.
- Bank of Canada Unveils New $5 and $10 Polymer Bank Notes
External links
| Wikimedia Commons has media related to Dextre. |
- Dextre, the International Space Station's Robotic Handyman - Canadian Space Agency
- Animation: Canadarm2 & Dextre remove CATS science experiment from SpaceX's Dragon and passes it to Japan's Remote Manipulator arm on YouTube
- Animation: Canadarm2 & Dextre replacing a failed ammonia pump on YouTube
| Canadian astronauts |
| ||||
|---|---|---|---|---|---|
| Satellites | |||||
| Other space technology | |||||
| Facilities | |||||
| Contractors |
| ||||
| Related institutions | |||||
| International partners | |||||
| Other | |||||
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||