Epicyclic gearing
An epicyclic gear train (also known as planetary gear) consists of two gears mounted so that the center of one gear revolves around the center of the other. A carrier connects the centers of the two gears and rotates to carry one gear, called the planet gear or planet pinion, around the other, called the sun gear or sun wheel. The planet and sun gears mesh so that their pitch circles roll without slip. A point on the pitch circle of the planet gear traces an epicycloid curve. In this simplified case, the sun gear is fixed and the planetary gear(s) roll around the sun gear.
An epicyclic gear train can be assembled so the planet gear rolls on the inside of the pitch circle of a fixed, outer gear ring, or ring gear, sometimes called an annular gear. In this case, the curve traced by a point on the pitch circle of the planet is a hypocycloid.
The combination of epicycle gear trains with a planet engaging both a sun gear and a ring gear is called a planetary gear train.[1][2] In this case, the ring gear is usually fixed and the sun gear is driven.
Epicyclic gears get their name from their earliest application, which was the modelling of the movements of the planets in the heavens. Believing the planets, as everything in the heavens, to be perfect, they could only travel in perfect circles, but their motions as viewed from Earth could not be reconciled with circular motion .
Overview
Epicyclic gearing or planetary gearing is a gear system consisting of one or more outer, or planet, gears or pinions, revolving about a central sun gear or sun wheel.[3][4] Typically, the planet gears are mounted on a movable arm or carrier, which itself may rotate relative to the sun gear. Epicyclic gearing systems also incorporate the use of an outer ring gear or annulus, which meshes with the planet gears. Planetary gears (or epicyclic gears) are typically classified as simple or compound planetary gears. Simple planetary gears have one sun, one ring, one carrier, and one planet set. Compound planetary gears involve one or more of the following three types of structures: meshed-planet (there are at least two more planets in mesh with each other in each planet train), stepped-planet (there exists a shaft connection between two planets in each planet train), and multi-stage structures (the system contains two or more planet sets). Compared to simple planetary gears, compound planetary gears have the advantages of larger reduction ratio, higher torque-to-weight ratio, and more flexible configurations.
The axes of all gears are usually parallel, but for special cases like pencil sharpeners and differentials, they can be placed at an angle, introducing elements of bevel gear (see below). Further, the sun, planet carrier and ring axes are usually coaxial.
Epicyclic gearing is also available which consists of a sun, a carrier, and two planets which mesh with each other. One planet meshes with the sun gear, while the second planet meshes with the ring gear. For this case, when the carrier is fixed, the ring gear rotates in the same direction as the sun gear, thus providing a reversal in direction compared to standard epicyclic gearing.
History
At around 500 BC, the Greeks invented the idea of epicycles, of circles travelling on the circular orbits. With this theory Claudius Ptolemy in the Almagest in 148 AD was able to predict planetary orbital paths. The Antikythera Mechanism, circa 80 BC, had gearing which was able to approximate the moon's elliptical path through the heavens, and even to correct for the nine-year precession of that path.[5] (The Greeks would have seen it not as elliptical, but rather as epicyclic motion.)
In the 2nd-century AD treatise Almagest, Ptolemy used rotating deferent and epicycles that form epicyclic gear trains to predict the motions of the planets. Accurate predictions of the movement of the Sun, Moon and the five planets, Mercury, Venus, Mars, Jupiter and Saturn, across the sky assumed that each followed a trajectory traced by a point on the planet gear of an epicyclic gear train. This curve is called an epitrochoid.
Epicyclic gearing was used in the Antikythera Mechanism, circa 80 BC, to adjust the displayed position of the moon for the ellipticity of its orbit, and even for the apsidal precession of its orbit. Two facing gears were rotated around slightly different centers, and one drove the other not with meshed teeth but with a pin inserted into a slot on the second. As the slot drove the second gear, the radius of driving would change, thus invoking a speeding up and slowing down of the driven gear in each revolution.
In the 11th century AD, epicyclic gearing was reinvented by Ibn Khalaf al-Muradi in Al-Andalus. His geared water clock employed a complex gear train mechanism that included both segmental and epicyclic gearing.[6][7]
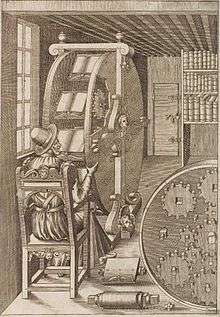
Richard of Wallingford, an English abbot of St Albans monastery, later described epicyclic gearing for an astronomical clock in the 14th century.[8] In 1588, Italian military engineer Agostino Ramelli invented the bookwheel, a vertically-revolving bookstand containing epicyclic gearing with two levels of planetary gears to maintain proper orientation of the books.[8][9]
Gear ratio of standard epicyclic gearing
The gear ratio of an epicyclic gearing system is somewhat non-intuitive, particularly because there are several ways in which an input rotation can be converted into an output rotation. The three basic components of the epicyclic gear are:
- Sun: The central gear
- Carrier: Holds one or more peripheral Planet gears, all of the same size, meshed with the sun gear
- Ring or Annulus: An outer ring with inward-facing teeth that mesh with the planet gear or gears
The overall gear ratio of a simple planetary gearset can be calculated using the following two equations,[1] representing the sun-planet and planet-ring interactions respectively:

where
- is the angular velocity of the Ring, Sun gear, Planet gears and planet Carrier respectively, and

- is the Number of teeth of the Ring, the Sun gear and each Planet gear respectively.

from which we can deduce that:

or

Considering .[10]

Alternatively, if the number of teeth on each gear meets the relationship , this equation can be re-written as the following:


where

These relationships can be used to analyze any epicyclic system, including those, such as hybrid vehicle transmissions, where two of the components are used as inputs with the third providing output relative to the two inputs.[11]
In many epicyclic gearing systems, one of these three basic components is held stationary; one of the two remaining components is an input, providing power to the system, while the last component is an output, receiving power from the system. The ratio of input rotation to output rotation is dependent upon the number of teeth in each gear, and upon which component is held stationary.
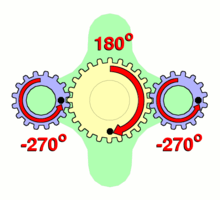
In one arrangement, the planetary carrier (green) is held stationary, and the sun gear (yellow) is used as input. In this case, the planetary gears simply rotate about their own axes (i.e., spin) at a rate determined by the number of teeth in each gear. If the sun gear has Ns teeth, and each planet gear has Np teeth, then the ratio is equal to −Ns/Np. For instance, if the sun gear has 24 teeth, and each planet has 16 teeth, then the ratio is −24/16, or −3/2; this means that one clockwise turn of the sun gear produces 1.5 counterclockwise turns of each of the planet gear(s) about its axis.
This rotation of the planet gears can in turn drive the ring gear (not depicted in diagram), in a corresponding ratio. If the ring gear has Nr teeth, then the ring will rotate by Np/Nr turns for each turn of the planet gears. For instance, if the ring gear has 64 teeth, and the planets 16, one clockwise turn of a planet gear results in 16/64, or 1/4 clockwise turns of the ring gear. Extending this case from the one above:
- One turn of the sun gear results in turns of the planets
- One turn of a planet gear results in turns of the ring gear


So, with the planetary carrier locked, one turn of the sun gear results in turns of the ring gear.

The ring gear may also be held fixed, with input provided to the planetary gear carrier; output rotation is then produced from the sun gear. This configuration will produce an increase in gear ratio, equal to 1+Nr/Ns.
If the ring gear is held stationary and the sun gear is used as the input, the planet carrier will be the output. The gear ratio in this case will be 1/(1 + Nr/Ns) which can also be written as 1:(1 + Nr/Ns). This is the lowest gear ratio attainable with an epicyclic gear train. This type of gearing is sometimes used in tractors and construction equipment to provide high torque to the drive wheels.
In bicycle hub gears, the sun is usually stationary, being keyed to the axle or even machined directly onto it. The planetary gear carrier is used as input. In this case the gear ratio is simply given by (Ns+Nr)/Nr. The number of teeth in the planet gear is irrelevant.

Torque ratios of standard epicyclic gearing
In epicyclic gears, two speeds must be known, in order to determine the third speed. However, in a steady state condition, only one torque must be known, in order to determine the other two torques. The equations which determine torque are:






where: — Torque of ring (annulus), — Torque of sun, — Torque of carrier. For all three, these are the torques applied to the mechanism (input torques). Output torques have the reverse sign of input torques.



In the cases where gears are accelerating, or to account for friction, these equations must be modified.
Fixed carrier train ratio
A convenient approach to determine the various speed ratios available in a planetary gear train begins by considering the speed ratio of the gear train when the carrier is held fixed. This is known as the fixed carrier train ratio.[2]
In the case of a simple planetary gear train formed by a carrier supporting a planet gear engaged with a sun and ring gear, the fixed carrier train ratio is computed as the speed ratio of the gear train formed by the sun, planet and ring gears on the fixed carrier. This is given by

In this calculation the planet gear is an idler gear.
The fundamental formula of the planetary gear train with a rotating carrier is obtained by recognizing that this formula remains true if the angular velocities of the sun, planet and ring gears are computed relative to the carrier angular velocity. This becomes,

This formula provides a simple way to determine the speed ratios for the simple planetary gear train under different conditions:
1. The carrier is held fixed, ωc=0,

2. The ring gear is held fixed, ωr=0,

3. The sun gear is held fixed, ωs=0,

Each of the speed ratios available to a simple planetary gear train can be obtained by using band brakes to hold and release the carrier, sun or ring gears as needed. This provides the basic structure for an automatic transmission.
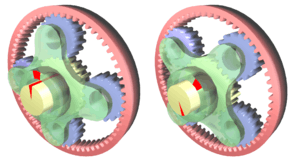
Spur gear differential
.jpg)
A spur gear differential is constructed from two identical coaxial epicyclic gear trains assembled with a single carrier such that their planet gears are engaged. This forms a planetary gear train with a fixed carrier train ratio R = −1.
In this case, the fundamental formula for the planetary gear train yields,

or

Thus, the angular velocity of the carrier of a spur gear differential is the average of the angular velocities of the sun and ring gears.
In discussing the spur gear differential, the use of the term ring gear is a convenient way to distinguish the sun gears of the two epicyclic gear trains. The second sun gear serves the same purpose as the ring gear of a simple planetary gear train, but clearly does not have the internal gear mate that is typical of a ring gear.[1]
Gear ratio of reversed epicyclic gearing
Some epicyclic gear trains employ two planetary gears which mesh with each other. One of these planets meshes with the sun gear, the other planet meshes with the ring gear. This results in different ratios being generated by the planetary. The fundamental equation becomes:

where

which results in:
- when the carrier is locked,

- when the sun is locked,

- when the ring gear is locked.

{kind=link}
Compound planetary gears

"Compound planetary gear" is a general concept and it refers to any planetary gears involving one or more of the following three types of structures: meshed-planet (there are at least two or more planets in mesh with each other in each planet train), stepped-planet (there exists a shaft connection between two planets in each planet train), and multi-stage structures (the system contains two or more planet sets).
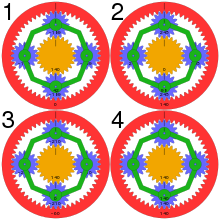
Some designs use "stepped-planet" which have two differently-sized gears on either end of a common shaft. The small end engages the sun, while the large end engages the ring gear. This may be necessary to achieve smaller step changes in gear ratio when the overall package size is limited. Compound planets have "timing marks" (or "relative gear mesh phase" in technical term). The assembly conditions of compound planetary gears are more restrictive than simple planetary gears,[12] and they must be assembled in the correct initial orientation relative to each other, or their teeth will not simultaneously engage the sun and ring gear at opposite ends of the planet, leading to very rough running and short life. Compound planetary gears can easily achieve larger transmission ratio with equal or smaller volume. For example, compound planets with teeth in a 2:1 ratio with a 50T ring gear would give the same effect as a 100T ring gear, but with half the actual diameter.
More planet and sun gear units can be placed in series in the same housing (where the output shaft of the first stage becomes the input shaft of the next stage) providing a larger (or smaller) gear ratio. This is the way mostautomatic transmissions work. In some cases multiple stages may even share the same ring gear which can be extended down the length of the transmission, or even be a structural part of the casing of smaller gearboxes.
During World War II, a special variation of epicyclic gearing was developed for portable radar gear, where a very high reduction ratio in a small package was needed. This had two outer ring gears, each half the thickness of the other gears. One of these two ring gears was held fixed and had one tooth fewer than did the other. Therefore, several turns of the "sun" gear made the "planet" gears complete a single revolution, which in turn made the rotating ring gear rotate by a single tooth like a Cycloidal drive.
Benefits

Planetary gear trains provide high power density in comparison to standard parallel axis gear trains. They provide a reduction in volume, multiple kinematic combinations, purely torsional reactions, and coaxial shafting. Disadvantages include high bearing loads, constant lubrication requirements, inaccessibility, and design complexity.[13][14]
The efficiency loss in a planetary gear train is typically about 3% per stage.[15] This type of efficiency ensures that a high proportion (about 97%) of the energy being input is transmitted through the gearbox, rather than being wasted on mechanical losses inside the gearbox.
The load in a planetary gear train is shared among multiple planets; therefore, torque capability is greatly increased. The more planets in the system, the greater the load ability and the higher the torque density.
The planetary gear train also provides stability due to an even distribution of mass and increased rotational stiffness. Torque applied radially onto the gears of a planetary gear train is transferred radially by the gear, without lateral pressure on the gear teeth.
In a typical application, the drive power connects to the sun gear. The sun gear then drives the planetary gears assembled with the external gear ring to operate. The whole set of planetary gear system revolves on its own axis and along the external gear ring where the output shaft connected to the planetary carrier achieves the goal of speed reduction. A higher reduction ratio can be achieved by doubling the multiple staged gears and planetary gears which can operate within the same ring gear.
The method of motion of a planetary gear structure is different from traditional parallel gears. Traditional gears rely on a small number of contact points between two gears to transfer the driving force. In this case, all the loading is concentrated on a few contacting surfaces, making the gears wear quickly and sometimes crack. But the planetary speed reducer has multiple gear contacting surfaces with a larger area that can distribute the loading evenly around the central axis. Multiple gear surfaces share the load, including any instantaneous impact loading, evenly, which make them more resistant to damage from higher torque. The housing and bearing parts are also less likely to be damaged from high loading as only the planet carrier bearings experience significant lateral force from the transmission of torque, radial forces oppose each other and are balanced, and axial forces only arise when using helical gears.
3D printing
Planetary gears have become popular in 3D printing for a few different reasons. Planetary gear boxes can provide a large gear ratio in a small, light-weight package. Some people install such gearboxes to get more accurate 3D prints by gearing-down the movement of their stepper motors.
A geared-down motor must turn farther and faster in order to produce the same output movement in the 3D printer which is advantageous if it is not outweighed by the slower movement speed. If the stepper motor has to turn farther then it also has to take more steps to move the printer a given distance; therefore, the geared-down stepper motor has a smaller minimum step-size than the same stepper motor without a gearbox. While there are many involved factors, planetary gearboxes may help produce very high quality 3D prints.
One popular use of 3D printed planetary gear systems is as toys for children. Since herringbone gears are easy to 3D print, it has become very popular to 3D print a moving herringbone planetary gear system for teaching children how gears work. An advantage of herringbone gears is that they don't fall out of the ring and don't need a mounting plate, allowing the moving parts to be clearly seen.
Gallery
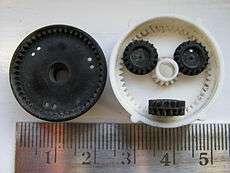 Split ring, compound planet, epicyclic gears of a car rear-view mirror positioner. This has a ratio from input sun gear to output black ring gear of −5/352.
Split ring, compound planet, epicyclic gears of a car rear-view mirror positioner. This has a ratio from input sun gear to output black ring gear of −5/352.
 Reduction gears on Pratt & Whitney Canada PT6 gas turbine engine.
Reduction gears on Pratt & Whitney Canada PT6 gas turbine engine. One of three sets of three gears inside the planet carrier of a Ford FMX. Ravigneaux transmission
One of three sets of three gears inside the planet carrier of a Ford FMX. Ravigneaux transmission
See also
- Hypocycloidal gearing
- Antikythera mechanism – ancient mechanical astronomical computer
- Continuously variable transmission (CVT)
- Cycloidal drive
- Epicycloid
- Ford Model T – had a 2 speed planetary transmission.
- Gearbox
- Harmonic drive
- Hub gear, for bicycles, etc.
- NuVinci Continuously Variable Transmission
- Ravigneaux planetary gearset
- Rohloff Speedhub – 14-ratio bicycle hub gearbox
- Simpson planetary gearset
- Sturmey Archer – First major manufacturer of bicycle hubs using planetary gears
References
- J. J. Uicker, G. R. Pennock and J. E. Shigley, 2003, Theory of Machines and Mechanisms, Oxford University Press, New York.
- B. Paul, 1979, Kinematics and Dynamics of Planar Machinery, Prentice Hall.
- Hillier, V.A.W. (2001). "Planetary gearing and unidirectional clutches". Fundamentals of Motor Vehicle Technology (4th ed.). Cheltenham, UK: Nelson Thornes. p. 244. ISBN 0-74-870531-7.
- Harrison, H.; Nettleton, T. (1994). Principles of Engineering Mechanics (2nd ed.). Oxford, UK: Butterworth-Heinemann. p. 58. ISBN 0-34-056831-3.
- Wright, M. T. (2007). "The Antikythera Mechanism reconsidered" (PDF). Interdisciplinary Science Reviews. 32 (1): 27–43. doi:10.1179/030801807X163670. Retrieved 20 May 2014.
- Hassan, Ahmad Y., Transfer Of Islamic Technology To The West, Part II: Transmission Of Islamic Engineering, History of Science and Technology in Islam
- Donald Routledge Hill (1996). A history of engineering in classical and medieval times. Routledge. pp. 203, 223, 242. ISBN 0-415-15291-7.
- JJ Coy, DP Townsend, EV Zaretsky, "Gearing", NASA Reference Publication 1152, AVSCOM Technical Report 84-C-15, 1985
- Chad Randl, "Revolving architecture: a history of buildings that rotate, swivel, and pivot", p19
- "How to derive and calculate epicyclic gear ratio equations in planetary gear systems".
- John M. Miller (May 2006). "Hybrid electric vehicle propulsion system architectures of the e-CVT type". IEEE Transactions on Power Electronics. 21 (3): 756–767. Bibcode:2006ITPE...21..756M. doi:10.1109/TPEL.2006.872372.
- P. A. Simionescu (1998-09-01). "A Unified Approach to the Assembly Condition of Epicyclic Gears". Journal of Mechanical Design. 120 (3): 448–453. doi:10.1115/1.2829172.
- Lynwander, P., 1983, Gear Drive Systems: Design and Application. Marcel Dekker, New York
- Smith, J. D., 1983, Gears and Their Vibration: A Basic Approach to Understanding Gear Noise. Marcel Dekker, New York and MacMillan, London
- "Planetary Gear" (PDF). people.eecs.berkeley.edu. 2011. Retrieved 2019-09-29.
External links
| Wikimedia Commons has media related to Epicyclic gears. |
- Kinematic Models for Design Digital Library (KMODDL), movies and photos of hundreds of working mechanical-systems models at Cornell.
- "Epicyclic gearing animation in SVG"
- "Animation of Epicyclic gearing"
- The "Power Split Device"
- The "Interactive Planetary Gearset tutorial"
- Prius Gearbox
- Planetary Gearbox
- Ph.D. Dissertation on Compound Planetary Gears
- Short Cuts for Analyzing Planetary Gearing
- Vetorial annimation: annulus, planets and sun gear.