Angular momentum
In physics, angular momentum (rarely, moment of momentum or rotational momentum) is the rotational equivalent of linear momentum. It is an important quantity in physics because it is a conserved quantity—the total angular momentum of a closed system remains constant.
| Angular momentum | |
|---|---|
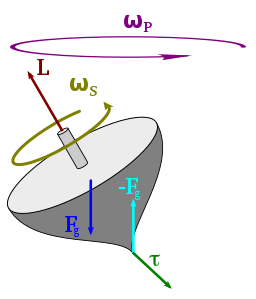
 This gyroscope remains upright while spinning due to the conservation of its angular momentum. | |
Common symbols | L |
| In SI base units | kg m2 s−1 |
| Conserved? | yes |
Derivations from other quantities | L = Iω = r × p |
| Dimension | M L2T−1 |
| Part of a series on |
| Classical mechanics |
|---|
Second law of motion |
|
Core topics |
|
Categories ► Classical mechanics |

In three dimensions, the angular momentum for a point particle is a pseudovector r × p, the cross product of the particle's position vector r (relative to some origin) and its momentum vector; the latter is p = mv in Newtonian mechanics. This definition can be applied to each point in continua like solids or fluids, or physical fields. Unlike momentum, angular momentum does depend on where the origin is chosen, since the particle's position is measured from it.
Just like for angular velocity, there are two special types of angular momentum: the spin angular momentum and orbital angular momentum. The spin angular momentum of an object is defined as the angular momentum about its centre of mass coordinate. The orbital angular momentum of an object about a chosen origin is defined as the angular momentum of the centre of mass about the origin. The total angular momentum of an object is the sum of the spin and orbital angular momenta. The orbital angular momentum vector of a point particle is always parallel and directly proportional to the orbital angular velocity vector ω of the particle, where the constant of proportionality depends on both the mass of the particle and its distance from origin. The spin angular momentum vector of a rigid body is proportional but not always parallel to the spin angular velocity vector Ω, making the constant of proportionality a second-rank tensor rather than a scalar.
Angular momentum is an extensive quantity; i.e. the total angular momentum of any composite system is the sum of the angular momenta of its constituent parts. For a continuous rigid body, the total angular momentum is the volume integral of angular momentum density (i.e. angular momentum per unit volume in the limit as volume shrinks to zero) over the entire body.
Torque can be defined as the rate of change of angular momentum, analogous to force. The net external torque on any system is always equal to the total torque on the system; in other words, the sum of all internal torques of any system is always 0 (this is the rotational analogue of Newton's Third Law). Therefore, for a closed system (where there is no net external torque), the total torque on the system must be 0, which means that the total angular momentum of the system is constant. The conservation of angular momentum helps explain many observed phenomena, for example the increase in rotational speed of a spinning figure skater as the skater's arms are contracted, the high rotational rates of neutron stars, the Coriolis effect, and the precession of gyroscopes. In general, conservation does limit the possible motion of a system, but does not uniquely determine what the exact motion is.
In quantum mechanics, angular momentum (like other quantities) is expressed as an operator, and its one-dimensional projections have quantized eigenvalues. Angular momentum is subject to the Heisenberg uncertainty principle, implying that at any time, only one projection (also called "component") can be measured with definite precision; the other two then remain uncertain. Because of this, the notion of a quantum particle literally "spinning" about an axis does not exist. Quantum particles do possess a type of non-orbital angular momentum called "spin", but this angular momentum does not correspond to actual spinning motion.[1]
In classical mechanics
Definition
Orbital angular momentum in two dimensions
Angular momentum is a vector quantity (more precisely, a pseudovector) that represents the product of a body's rotational inertia and rotational velocity (in radians/sec) about a particular axis. However, if the particle's trajectory lies in a single plane, it is sufficient to discard the vector nature of angular momentum, and treat it as a scalar (more precisely, a pseudoscalar).[2] Angular momentum can be considered a rotational analog of linear momentum. Thus, where linear momentum is proportional to mass and linear speed ,




angular momentum is proportional to moment of inertia and angular speed measured in radians per second.[3]




Unlike mass, which depends only on amount of matter, moment of inertia is also dependent on the position of the axis of rotation and the shape of the matter. Unlike linear velocity, which does not depend upon the choice of origin, orbital angular velocity is always measured with respect to a fixed origin. Therefore, strictly speaking, should be referred to as the angular momentum relative to that center.[4]
Because for a single particle and for circular motion, angular momentum can be expanded, and reduced to,




the product of the radius of rotation and the linear momentum of the particle , where in this case is the equivalent linear (tangential) speed at the radius ().



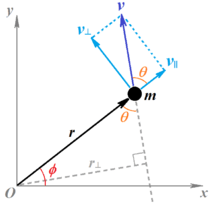
This simple analysis can also apply to non-circular motion if only the component of the motion which is perpendicular to the radius vector is considered. In that case,

where is the perpendicular component of the motion. Expanding, rearranging, and reducing, angular momentum can also be expressed,




where is the length of the moment arm, a line dropped perpendicularly from the origin onto the path of the particle. It is this definition, (length of moment arm)×(linear momentum) to which the term moment of momentum refers.[5]

Scalar—angular momentum from Lagrangian mechanics
Another approach is to define angular momentum as the conjugate momentum (also called canonical momentum) of the angular coordinate expressed in the Lagrangian of the mechanical system. Consider a mechanical system with a mass constrained to move in a circle of radius in the absence of any external force field. The kinetic energy of the system is



And the potential energy is

Then the Lagrangian is

The generalized momentum "canonically conjugate to" the coordinate is defined by

Orbital angular momentum in three dimensions
To completely define orbital angular momentum in three dimensions, it is required to know the rate at which the position vector sweeps out angle, the direction perpendicular to the instantaneous plane of angular displacement, and the mass involved, as well as how this mass is distributed in space.[6] By retaining this vector nature of angular momentum, the general nature of the equations is also retained, and can describe any sort of three-dimensional motion about the center of rotation – circular, linear, or otherwise. In vector notation, the orbital angular momentum of a point particle in motion about the origin can be expressed as:

where
- is the moment of inertia for a point mass,
- is the orbital angular velocity in radians/sec (units 1/sec) of the particle about the origin,
- is the position vector of the particle relative to the origin, ,
- is the linear velocity of the particle relative to the origin, and
- is the mass of the particle.




This can be expanded, reduced, and by the rules of vector algebra, rearranged:

which is the cross product of the position vector and the linear momentum of the particle. By the definition of the cross product, the vector is perpendicular to both and . It is directed perpendicular to the plane of angular displacement, as indicated by the right-hand rule – so that the angular velocity is seen as counter-clockwise from the head of the vector. Conversely, the vector defines the plane in which and lie.



By defining a unit vector perpendicular to the plane of angular displacement, a scalar angular speed results, where

- and
- where is the perpendicular component of the motion, as above.



The two-dimensional scalar equations of the previous section can thus be given direction:

and for circular motion, where all of the motion is perpendicular to the radius .

In the spherical coordinate system the angular momentum vector expresses as

Discussion
Angular momentum can be described as the rotational analog of linear momentum. Like linear momentum it involves elements of mass and displacement. Unlike linear momentum it also involves elements of position and shape.
Many problems in physics involve matter in motion about some certain point in space, be it in actual rotation about it, or simply moving past it, where it is desired to know what effect the moving matter has on the point—can it exert energy upon it or perform work about it? Energy, the ability to do work, can be stored in matter by setting it in motion—a combination of its inertia and its displacement. Inertia is measured by its mass, and displacement by its velocity. Their product,

is the matter's momentum.[7] Referring this momentum to a central point introduces a complication: the momentum is not applied to the point directly. For instance, a particle of matter at the outer edge of a wheel is, in effect, at the end of a lever of the same length as the wheel's radius, its momentum turning the lever about the center point. This imaginary lever is known as the moment arm. It has the effect of multiplying the momentum's effort in proportion to its length, an effect known as a moment. Hence, the particle's momentum referred to a particular point,

is the angular momentum, sometimes called, as here, the moment of momentum of the particle versus that particular center point. The equation combines a moment (a mass turning moment arm ) with a linear (straight-line equivalent) speed . Linear speed referred to the central point is simply the product of the distance and the angular speed versus the point: another moment. Hence, angular momentum contains a double moment: Simplifying slightly, the quantity is the particle's moment of inertia, sometimes called the second moment of mass. It is a measure of rotational inertia.[8]





Because moment of inertia is a crucial part of the spin angular momentum, the latter necessarily includes all of the complications of the former, which is calculated by multiplying elementary bits of the mass by the squares of their distances from the center of rotation.[9] Therefore, the total moment of inertia, and the angular momentum, is a complex function of the configuration of the matter about the center of rotation and the orientation of the rotation for the various bits.
For a rigid body, for instance a wheel or an asteroid, the orientation of rotation is simply the position of the rotation axis versus the matter of the body. It may or may not pass through the center of mass, or it may lie completely outside of the body. For the same body, angular momentum may take a different value for every possible axis about which rotation may take place.[10] It reaches a minimum when the axis passes through the center of mass.[11]
For a collection of objects revolving about a center, for instance all of the bodies of the Solar System, the orientations may be somewhat organized, as is the Solar System, with most of the bodies' axes lying close to the system's axis. Their orientations may also be completely random.
In brief, the more mass and the farther it is from the center of rotation (the longer the moment arm), the greater the moment of inertia, and therefore the greater the angular momentum for a given angular velocity. In many cases the moment of inertia, and hence the angular momentum, can be simplified by,[12]
- where is the radius of gyration, the distance from the axis at which the entire mass may be considered as concentrated.


Similarly, for a point mass the moment of inertia is defined as,
- where is the radius of the point mass from the center of rotation,
and for any collection of particles as the sum,


Angular momentum's dependence on position and shape is reflected in its units versus linear momentum: kg⋅m2/s, N⋅m⋅s, or J⋅s for angular momentum versus kg⋅m/s or N⋅s for linear momentum. When calculating angular momentum as the product of the moment of inertia times the angular velocity, the angular velocity must be expressed in radians per second, where the radian assumes the dimensionless value of unity. (When performing dimensional analysis, it may be productive to use orientational analysis which treats radians as a base unit, but this is outside the scope of the International system of units). Angular momentum's units can be interpreted as torque⋅time or as energy⋅time per angle. An object with angular momentum of L N⋅m⋅s can be reduced to zero rotation (all of the rotational energy can be transferred out of it) by an angular impulse of L N⋅m⋅s[13] or equivalently, by torque or work of L N⋅m for one second, or energy of L J for one second.[14]
The plane perpendicular to the axis of angular momentum and passing through the center of mass[15] is sometimes called the invariable plane, because the direction of the axis remains fixed if only the interactions of the bodies within the system, free from outside influences, are considered.[16] One such plane is the invariable plane of the Solar System.
Angular momentum and torque
Newton's second law of motion can be expressed mathematically,

or force = mass × acceleration. The rotational equivalent for point particles may be derived as follows:

which means that the torque (i.e. the time derivative of the angular momentum) is

Because the moment of inertia is , it follows that , and which, reduces to




This is the rotational analog of Newton's Second Law. Note that the torque is not necessarily proportional or parallel to the angular acceleration (as one might expect). The reason for this is that the moment of inertia of a particle can change with time, something that cannot occur for ordinary mass.
Conservation of angular momentum
.jpg)
A rotational analog of Newton's third law of motion might be written, "In a closed system, no torque can be exerted on any matter without the exertion on some other matter of an equal and opposite torque."[17] Hence, angular momentum can be exchanged between objects in a closed system, but total angular momentum before and after an exchange remains constant (is conserved).[18]
Seen another way, a rotational analogue of Newton's first law of motion might be written, "A rigid body continues in a state of uniform rotation unless acted by an external influence."[17] Thus with no external influence to act upon it, the original angular momentum of the system remains constant.[19]
The conservation of angular momentum is used in analyzing central force motion. If the net force on some body is directed always toward some point, the center, then there is no torque on the body with respect to the center, as all of the force is directed along the radius vector, and none is perpendicular to the radius. Mathematically, torque because in this case and are parallel vectors. Therefore, the angular momentum of the body about the center is constant. This is the case with gravitational attraction in the orbits of planets and satellites, where the gravitational force is always directed toward the primary body and orbiting bodies conserve angular momentum by exchanging distance and velocity as they move about the primary. Central force motion is also used in the analysis of the Bohr model of the atom.


For a planet, angular momentum is distributed between the spin of the planet and its revolution in its orbit, and these are often exchanged by various mechanisms. The conservation of angular momentum in the Earth–Moon system results in the transfer of angular momentum from Earth to Moon, due to tidal torque the Moon exerts on the Earth. This in turn results in the slowing down of the rotation rate of Earth, at about 65.7 nanoseconds per day,[20] and in gradual increase of the radius of Moon's orbit, at about 3.82 centimeters per year.[21]
The conservation of angular momentum explains the angular acceleration of an ice skater as she brings her arms and legs close to the vertical axis of rotation. By bringing part of the mass of her body closer to the axis, she decreases her body's moment of inertia. Because angular momentum is the product of moment of inertia and angular velocity, if the angular momentum remains constant (is conserved), then the angular velocity (rotational speed) of the skater must increase.
The same phenomenon results in extremely fast spin of compact stars (like white dwarfs, neutron stars and black holes) when they are formed out of much larger and slower rotating stars. Decrease in the size of an object n times results in increase of its angular velocity by the factor of n2.
Conservation is not always a full explanation for the dynamics of a system but is a key constraint. For example, a spinning top is subject to gravitational torque making it lean over and change the angular momentum about the nutation axis, but neglecting friction at the point of spinning contact, it has a conserved angular momentum about its spinning axis, and another about its precession axis. Also, in any planetary system, the planets, star(s), comets, and asteroids can all move in numerous complicated ways, but only so that the angular momentum of the system is conserved.
Noether's theorem states that every conservation law is associated with a symmetry (invariant) of the underlying physics. The symmetry associated with conservation of angular momentum is rotational invariance. The fact that the physics of a system is unchanged if it is rotated by any angle about an axis implies that angular momentum is conserved.[22]
Angular momentum in orbital mechanics
In astrodynamics and celestial mechanics, a massless (or per unit mass) angular momentum is defined[23]

called specific angular momentum. Note that Mass is often unimportant in orbital mechanics calculations, because motion is defined by gravity. The primary body of the system is often so much larger than any bodies in motion about it that the smaller bodies have a negligible gravitational effect on it; it is, in effect, stationary. All bodies are apparently attracted by its gravity in the same way, regardless of mass, and therefore all move approximately the same way under the same conditions.

Solid bodies
For a continuous mass distribution with density function ρ(r), a differential volume element dV with position vector r within the mass has a mass element dm = ρ(r)dV. Therefore, the infinitesimal angular momentum of this element is:

and integrating this differential over the volume of the entire mass gives its total angular momentum:

In the derivation which follows, integrals similar to this can replace the sums for the case of continuous mass.
Collection of particles
Center of mass
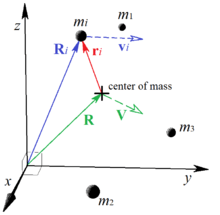
For a collection of particles in motion about an arbitrary origin, it is informative to develop the equation of angular momentum by resolving their motion into components about their own center of mass and about the origin. Given,
- is the mass of particle ,
- is the position vector of particle vs the origin,
- is the velocity of particle vs the origin,
- is the position vector of the center of mass vs the origin,
- is the velocity of the center of mass vs the origin,
- is the position vector of particle vs the center of mass,
- is the velocity of particle vs the center of mass,







The total mass of the particles is simply their sum,

The position vector of the center of mass is defined by,[24]

By inspection,
- and


The total angular momentum of the collection of particles is the sum of the angular momentum of each particle,
(1)

Expanding ,

Expanding ,

It can be shown that (see sidebar),
|
Prove that
which, by the definition of the center of mass, is and similarly for |




- and

therefore the second and third terms vanish,

The first term can be rearranged,

and total angular momentum for the collection of particles is finally,[25]
(2)

The first term is the angular momentum of the center of mass relative to the origin. Similar to Single particle, below, it is the angular momentum of one particle of mass M at the center of mass moving with velocity V. The second term is the angular momentum of the particles moving relative to the center of mass, similar to Fixed center of mass, below. The result is general—the motion of the particles is not restricted to rotation or revolution about the origin or center of mass. The particles need not be individual masses, but can be elements of a continuous distribution, such as a solid body.
Rearranging equation (2) by vector identities, multiplying both terms by "one", and grouping appropriately,

gives the total angular momentum of the system of particles in terms of moment of inertia and angular velocity ,

(3)

Simplifications
Single particle
In the case of a single particle moving about the arbitrary origin,











Angular momentum (modern definition)
In modern (20th century) theoretical physics, angular momentum (not including any intrinsic angular momentum – see below) is described using a different formalism, instead of a classical pseudovector. In this formalism, angular momentum is the 2-form Noether charge associated with rotational invariance. As a result, angular momentum is not conserved for general curved spacetimes, unless it happens to be asymptotically rotationally invariant.
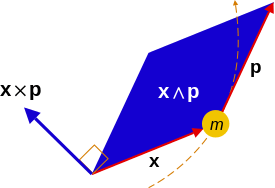
In classical mechanics, the angular momentum of a particle can be reinterpreted as a plane element:

in which the exterior product ∧ replaces the cross product × (these products have similar characteristics but are nonequivalent). This has the advantage of a clearer geometric interpretation as a plane element, defined from the x and p vectors, and the expression is true in any number of dimensions (two or higher). In Cartesian coordinates:

or more compactly in index notation:

The angular velocity can also be defined as an antisymmetric second order tensor, with components ωij. The relation between the two antisymmetric tensors is given by the moment of inertia which must now be a fourth order tensor:[26]

Again, this equation in L and ω as tensors is true in any number of dimensions. This equation also appears in the geometric algebra formalism, in which L and ω are bivectors, and the moment of inertia is a mapping between them.
In relativistic mechanics, the relativistic angular momentum of a particle is expressed as an antisymmetric tensor of second order:

in the language of four-vectors, namely the four position X and the four momentum P, and absorbs the above L together with the motion of the centre of mass of the particle.
In each of the above cases, for a system of particles, the total angular momentum is just the sum of the individual particle angular momenta, and the centre of mass is for the system.
In quantum mechanics
Angular momentum in quantum mechanics differs in many profound respects from angular momentum in classical mechanics. In relativistic quantum mechanics, it differs even more, in which the above relativistic definition becomes a tensorial operator.
Spin, orbital, and total angular momentum
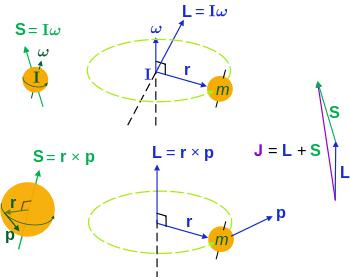
- Left: "spin" angular momentum S is really orbital angular momentum of the object at every point.
- Right: extrinsic orbital angular momentum L about an axis.
- Top: the moment of inertia tensor I and angular velocity ω (L is not always parallel to ω).[27]
- Bottom: momentum p and its radial position r from the axis. The total angular momentum (spin plus orbital) is J. For a quantum particle the interpretations are different; particle spin does not have the above interpretation.
The classical definition of angular momentum as can be carried over to quantum mechanics, by reinterpreting r as the quantum position operator and p as the quantum momentum operator. L is then an operator, specifically called the orbital angular momentum operator. The components of the angular momentum operator satisfy the commutation relations of the Lie algebra so(3). Indeed, these operators are precisely the infinitesimal action of the rotation group on the quantum Hilbert space.[28] (See also the discussion below of the angular momentum operators as the generators of rotations.)

However, in quantum physics, there is another type of angular momentum, called spin angular momentum, represented by the spin operator S. Almost all elementary particles have nonvanishing spin.[29] Spin is often depicted as a particle literally spinning around an axis, but this is a misleading and inaccurate picture: spin is an intrinsic property of a particle, unrelated to any sort of motion in space and fundamentally different from orbital angular momentum. All elementary particles have a characteristic spin (possibly zero),[30] for example electrons have "spin 1/2" (this actually means "spin ħ/2"), photons have "spin 1" (this actually means "spin ħ"), and pi-mesons have spin 0.[31]
Finally, there is total angular momentum J, which combines both the spin and orbital angular momentum of all particles and fields. (For one particle, J = L + S.) Conservation of angular momentum applies to J, but not to L or S; for example, the spin–orbit interaction allows angular momentum to transfer back and forth between L and S, with the total remaining constant. Electrons and photons need not have integer-based values for total angular momentum, but can also have fractional values.[32]
Quantization
In quantum mechanics, angular momentum is quantized – that is, it cannot vary continuously, but only in "quantum leaps" between certain allowed values. For any system, the following restrictions on measurement results apply, where is the reduced Planck constant and is any Euclidean vector such as x, y, or z:


| If you measure... | The result can be... |
| or | |
| , where | |
| or | , where |











(There are additional restrictions as well, see angular momentum operator for details.)
The reduced Planck constant is tiny by everyday standards, about 10−34 J s, and therefore this quantization does not noticeably affect the angular momentum of macroscopic objects. However, it is very important in the microscopic world. For example, the structure of electron shells and subshells in chemistry is significantly affected by the quantization of angular momentum.
Quantization of angular momentum was first postulated by Niels Bohr in his Bohr model of the atom and was later predicted by Erwin Schrödinger in his Schrödinger equation. Molecular angular momentum operators, and their commutation relations, are discussed in Section 10.3 on pages 220-226 of the textbook by Bunker and Jensen. [33]
Uncertainty
In the definition , six operators are involved: The position operators , , , and the momentum operators , , . However, the Heisenberg uncertainty principle tells us that it is not possible for all six of these quantities to be known simultaneously with arbitrary precision. Therefore, there are limits to what can be known or measured about a particle's angular momentum. It turns out that the best that one can do is to simultaneously measure both the angular momentum vector's magnitude and its component along one axis.






The uncertainty is closely related to the fact that different components of an angular momentum operator do not commute, for example . (For the precise commutation relations, see angular momentum operator.)

Total angular momentum as generator of rotations
As mentioned above, orbital angular momentum L is defined as in classical mechanics: , but total angular momentum J is defined in a different, more basic way: J is defined as the "generator of rotations".[34] More specifically, J is defined so that the operator

is the rotation operator that takes any system and rotates it by angle about the axis . (The "exp" in the formula refers to operator exponential) To put this the other way around, whatever our quantum Hilbert space is, we expect that the rotation group SO(3) will act on it. There is then an associated action of the Lie algebra so(3) of SO(3); the operators describing the action of so(3) on our Hilbert space are the (total) angular momentum operators.

The relationship between the angular momentum operator and the rotation operators is the same as the relationship between Lie algebras and Lie groups in mathematics. The close relationship between angular momentum and rotations is reflected in Noether's theorem that proves that angular momentum is conserved whenever the laws of physics are rotationally invariant.
In electrodynamics
When describing the motion of a charged particle in an electromagnetic field, the canonical momentum P (derived from the Lagrangian for this system) is not gauge invariant. As a consequence, the canonical angular momentum L = r × P is not gauge invariant either. Instead, the momentum that is physical, the so-called kinetic momentum (used throughout this article), is (in SI units)

where e is the electric charge of the particle and A the magnetic vector potential of the electromagnetic field. The gauge-invariant angular momentum, that is kinetic angular momentum, is given by

The interplay with quantum mechanics is discussed further in the article on canonical commutation relations.
In optics
In classical Maxwell electrodynamics the Poynting vector is a linear momentum density of electromagnetic field.[35]

The angular momentum density vector is given by a vector product as in classical mechanics:[36]


The above identities are valid locally, i.e. in each space point in a given moment .

History
Newton, in the Principia, hinted at angular momentum in his examples of the First Law of Motion,
- A top, whose parts by their cohesion are perpetually drawn aside from rectilinear motions, does not cease its rotation, otherwise than as it is retarded by the air. The greater bodies of the planets and comets, meeting with less resistance in more free spaces, preserve their motions both progressive and circular for a much longer time.[37]
He did not further investigate angular momentum directly in the Principia,
- From such kind of reflexions also sometimes arise the circular motions of bodies about their own centres. But these are cases which I do not consider in what follows; and it would be too tedious to demonstrate every particular that relates to this subject.[38]
However, his geometric proof of the law of areas is an outstanding example of Newton's genius, and indirectly proves angular momentum conservation in the case of a central force.
The Law of Areas
Newton's derivation
As a planet orbits the Sun, the line between the Sun and the planet sweeps out equal areas in equal intervals of time. This had been known since Kepler expounded his second law of planetary motion. Newton derived a unique geometric proof, and went on to show that the attractive force of the Sun's gravity was the cause of all of Kepler's laws.
During the first interval of time, an object is in motion from point A to point B. Undisturbed, it would continue to point c during the second interval. When the object arrives at B, it receives an impulse directed toward point S. The impulse gives it a small added velocity toward S, such that if this were its only velocity, it would move from B to V during the second interval. By the rules of velocity composition, these two velocities add, and point C is found by construction of parallelogram BcCV. Thus the object's path is deflected by the impulse so that it arrives at point C at the end of the second interval. Because the triangles SBc and SBC have the same base SB and the same height Bc or VC, they have the same area. By symmetry, triangle SBc also has the same area as triangle SAB, therefore the object has swept out equal areas SAB and SBC in equal times.
At point C, the object receives another impulse toward S, again deflecting its path during the third interval from d to D. Thus it continues to E and beyond, the triangles SAB, SBc, SBC, SCd, SCD, SDe, SDE all having the same area. Allowing the time intervals to become ever smaller, the path ABCDE approaches indefinitely close to a continuous curve.
Note that because this derivation is geometric, and no specific force is applied, it proves a more general law than Kepler's second law of planetary motion. It shows that the Law of Areas applies to any central force, attractive or repulsive, continuous or non-continuous, or zero.
Conservation of angular momentum in the Law of Areas
The proportionality of angular momentum to the area swept out by a moving object can be understood by realizing that the bases of the triangles, that is, the lines from S to the object, are equivalent to the radius r, and that the heights of the triangles are proportional to the perpendicular component of velocity v⊥. Hence, if the area swept per unit time is constant, then by the triangular area formula 1/2(base)(height), the product (base)(height) and therefore the product rv⊥ are constant: if r and the base length are decreased, v⊥ and height must increase proportionally. Mass is constant, therefore angular momentum rmv⊥ is conserved by this exchange of distance and velocity.
In the case of triangle SBC, area is equal to 1/2(SB)(VC). Wherever C is eventually located due to the impulse applied at B, the product (SB)(VC), and therefore rmv⊥ remain constant. Similarly so for each of the triangles.
After Newton
Leonhard Euler, Daniel Bernoulli, and Patrick d'Arcy all understood angular momentum in terms of conservation of areal velocity, a result of their analysis of Kepler's second law of planetary motion. It is unlikely that they realized the implications for ordinary rotating matter.[39]
In 1736 Euler, like Newton, touched on some of the equations of angular momentum in his Mechanica without further developing them.[40]
Bernoulli wrote in a 1744 letter of a "moment of rotational motion", possibly the first conception of angular momentum as we now understand it.[41]
In 1799, Pierre-Simon Laplace first realized that a fixed plane was associated with rotation—his invariable plane.
Louis Poinsot in 1803 began representing rotations as a line segment perpendicular to the rotation, and elaborated on the "conservation of moments".
In 1852 Léon Foucault used a gyroscope in an experiment to display the Earth's rotation.
William J. M. Rankine's 1858 Manual of Applied Mechanics defined angular momentum in the modern sense for the first time:
- ...a line whose length is proportional to the magnitude of the angular momentum, and whose direction is perpendicular to the plane of motion of the body and of the fixed point, and such, that when the motion of the body is viewed from the extremity of the line, the radius-vector of the body seems to have right-handed rotation.
In an 1872 edition of the same book, Rankine stated that "The term angular momentum was introduced by Mr. Hayward,"[42] probably referring to R.B. Hayward's article On a Direct Method of estimating Velocities, Accelerations, and all similar Quantities with respect to Axes moveable in any manner in Space with Applications,[43] which was introduced in 1856, and published in 1864. Rankine was mistaken, as numerous publications feature the term starting in the late 18th to early 19th centuries.[44] However, Hayward's article apparently was the first use of the term and the concept seen by much of the English-speaking world. Before this, angular momentum was typically referred to as "momentum of rotation" in English.[45]
See also
- Absolute angular momentum
- Angular momentum coupling
- Angular momentum of light
- Angular momentum diagrams (quantum mechanics)
- Clebsch–Gordan coefficients
- Linear-rotational analogs
- Orders of magnitude (angular momentum)
- Pauli–Lubanski pseudovector
- Relative angular momentum
- Relativistic angular momentum
- Rigid rotor
- Rotational energy
- Specific relative angular momentum
- Yrast
Footnotes
- de Podesta, Michael (2002). Understanding the Properties of Matter (2nd, illustrated, revised ed.). CRC Press. p. 29. ISBN 978-0-415-25788-6. Extract of page 29
- Wilson, E. B. (1915). Linear Momentum, Kinetic Energy and Angular Momentum. The American Mathematical Monthly. XXII. Ginn and Co., Boston, in cooperation with University of Chicago, et al. p. 190 – via Google books.
- Worthington, Arthur M. (1906). Dynamics of Rotation. Longmans, Green and Co., London. p. 21 – via Google books.
- Taylor, John R. (2005). Classical Mechanics. University Science Books, Mill Valley, CA. p. 90. ISBN 978-1-891389-22-1.
- Dadourian, H. M. (1913). Analytical Mechanics for Students of Physics and Engineering. D. Van Nostrand Company, New York. p. 266 – via Google books.
- Watson, W. (1912). General Physics. Longmans, Green and Co., New York. p. 33 – via Google books.
- Barker, George F. (1893). Physics: Advanced Course (4th ed.). Henry Holt and Company, New York. p. 66 – via Google Books.
- Barker, George F. (1893). Physics: Advanced Course (4th ed.). Henry Holt and Company, New York. pp. 67–68 – via Google Books.
- Oberg, Erik; et al. (2000). Machinery's Handbook (26th ed.). Industrial Press, Inc., New York. p. 143. ISBN 978-0-8311-2625-4.
- Watson, W. (1912). General Physics. Longmans, Green and Co., New York. p. 34 – via Google books.
- Kent, William (1916). The Mechanical Engineers' Pocket Book (9th ed.). John Wiley and Sons, Inc., New York. p. 517 – via Google books.
- Oberg, Erik; et al. (2000). Machinery's Handbook (26th ed.). Industrial Press, Inc., New York. p. 146. ISBN 978-0-8311-2625-4.
- Oberg, Erik; et al. (2000). Machinery's Handbook (26th ed.). Industrial Press, Inc., New York. pp. 161–162. ISBN 978-0-8311-2625-4.
- Kent, William (1916). The Mechanical Engineers' Pocket Book (9th ed.). John Wiley and Sons, Inc., New York. p. 527 – via Google books.
- Battin, Richard H. (1999). An Introduction to the Mathematics and Methods of Astrodynamics, Revised Edition. American Institute of Aeronautics and Astronautics, Inc. ISBN 978-1-56347-342-5., p. 97
- Rankine, W. J. M. (1872). A Manual of Applied Mechanics (6th ed.). Charles Griffin and Company, London. p. 507 – via Google books.
- Crew, Henry (1908). The Principles of Mechanics: For Students of Physics and Engineering. Longmans, Green, and Company, New York. p. 88 – via Google books.
- Worthington, Arthur M. (1906). Dynamics of Rotation. Longmans, Green and Co., London. p. 82 – via Google books.
- Worthington, Arthur M. (1906). Dynamics of Rotation. Longmans, Green and Co., London. p. 11 – via Google books.
- Stephenson, F. R.; Morrison, L. V.; Whitrow, G. J. (1984). "Long-term changes in the rotation of the earth – 700 B.C. to A.D. 1980". Philosophical Transactions of the Royal Society. 313 (1524): 67. Bibcode:1984RSPTA.313...47S. doi:10.1098/rsta.1984.0082. +2.40 ms/century divided by 36525 days.
- Dickey, J. O.; et al. (1994). "Lunar Laser Ranging: A Continuing Legacy of the Apollo Program" (PDF). Science. 265 (5171): 482–90, see 486. Bibcode:1994Sci...265..482D. doi:10.1126/science.265.5171.482. PMID 17781305.
- Landau, L. D.; Lifshitz, E. M. (1995). The classical theory of fields. Course of Theoretical Physics. Oxford, Butterworth–Heinemann. ISBN 978-0-7506-2768-9.
- Battin, Richard H. (1999). An Introduction to the Mathematics and Methods of Astrodynamics, Revised Edition. American Institute of Aeronautics and Astronautics, Inc. p. 115. ISBN 978-1-56347-342-5.
- Wilson, E. B. (1915). Linear Momentum, Kinetic Energy and Angular Momentum. The American Mathematical Monthly. XXII. Ginn and Co., Boston, in cooperation with University of Chicago, et al. p. 188, equation (3) – via Google books.
- Wilson, E. B. (1915). Linear Momentum, Kinetic Energy and Angular Momentum. The American Mathematical Monthly. XXII. Ginn and Co., Boston, in cooperation with University of Chicago, et al. p. 191, Theorem 8 – via Google books.
- Synge and Schild, Tensor calculus, Dover publications, 1978 edition, p. 161. ISBN 978-0-486-63612-2.
- R.P. Feynman; R.B. Leighton; M. Sands (1964). Feynman's Lectures on Physics (volume 2). Addison–Wesley. pp. 31–7. ISBN 978-0-201-02117-2.
- Hall 2013 Section 17.3
- Thaller, Thaller (2005). Advanced Visual Quantum Mechanics (illustrated ed.). Springer Science & Business Media. p. 114. ISBN 978-0-387-27127-9. Extract of page 114
- Veltman, Martinus J G (2018). Facts And Mysteries In Elementary Particle Physics (revised ed.). World Scientific. ISBN 978-981-323-707-0.
- Strange, Paul (1998). Relativistic Quantum Mechanics: With Applications in Condensed Matter and Atomic Physics (illustrated ed.). Cambridge University Press. p. 64. ISBN 978-0-521-56583-7. Extract of page 64
- Ballantine, K. E.; Donegan, J. F.; Eastham, P. R. (2016). "There are many ways to spin a photon: Half-quantization of a total optical angular momentum". Science Advances. 2 (4): e1501748. Bibcode:2016SciA....2E1748B. doi:10.1126/sciadv.1501748. PMC 5565928. PMID 28861467.
- Bunker, Philip R; Jensen Per, (1998), Molecular Symmetry and Spectroscopy, 2nd ed. NRC Research Press, Ottawa ISBN 9780660196282
- Littlejohn, Robert (2011). "Lecture notes on rotations in quantum mechanics" (PDF). Physics 221B Spring 2011. Retrieved 13 Jan 2012.
- Okulov, A Yu (2008). "Angular momentum of photons and phase conjugation". Journal of Physics B: Atomic, Molecular and Optical Physics. 41 (10): 101001. arXiv:0801.2675. Bibcode:2008JPhB...41j1001O. doi:10.1088/0953-4075/41/10/101001.
- Okulov, A.Y. (2008). "Optical and Sound Helical structures in a Mandelstam – Brillouin mirror". JETP Letters (in Russian). 88 (8): 561–566. Bibcode:2008JETPL..88..487O. doi:10.1134/s0021364008200046. Archived from the original on 2015-12-22. Retrieved 2015-10-31.
- Newton, Isaac (1803). "Axioms; or Laws of Motion, Law I". The Mathematical Principles of Natural Philosophy. Andrew Motte, translator. H. D. Symonds, London. p. 322 – via Google books.
- Newton, Axioms; or Laws of Motion, Corollary III
- see Borrelli, Arianna (2011). "Angular momentum between physics and mathematics" (PDF). for an excellent and detailed summary of the concept of angular momentum through history.
- Bruce, Ian (2008). "Euler : Mechanica Vol. 1".
- "Euler's Correspondence with Daniel Bernoulli, Bernoulli to Euler, 04 February, 1744" (PDF). The Euler Archive.
- Rankine, W. J. M. (1872). A Manual of Applied Mechanics (6th ed.). Charles Griffin and Company, London. p. 506 – via Google books.
- Hayward, Robert B. (1864). "On a Direct Method of estimating Velocities, Accelerations, and all similar Quantities with respect to Axes moveable in any manner in Space with Applications". Transactions of the Cambridge Philosophical Society. 10: 1. Bibcode:1864TCaPS..10....1H.
- see, for instance, Gompertz, Benjamin (1818). "On Pendulums vibrating between Cheeks". The Journal of Science and the Arts. III (V): 17 – via Google books.; Herapath, John (1847). Mathematical Physics. Whittaker and Co., London. p. 56 – via Google books.
- see, for instance, Landen, John (1785). "Of the Rotatory Motion of a Body of any Form whatever". Philosophical Transactions. LXXV (I): 311–332. doi:10.1098/rstl.1785.0016.
References
- Cohen-Tannoudji, Claude; Diu, Bernard; Laloë, Franck (2006). Quantum Mechanics (2 volume set ed.). John Wiley & Sons. ISBN 978-0-471-56952-7.
- Condon, E. U.; Shortley, G. H. (1935). "Especially Chapter 3". The Theory of Atomic Spectra. Cambridge University Press. ISBN 978-0-521-09209-8.
- Edmonds, A. R. (1957). Angular Momentum in Quantum Mechanics. Princeton University Press. ISBN 978-0-691-07912-7.
- Hall, Brian C. (2013), Quantum Theory for Mathematicians, Graduate Texts in Mathematics, 267, Springer, ISBN 978-0-387-40122-5.
- Jackson, John David (1998). Classical Electrodynamics (3rd ed.). John Wiley & Sons. ISBN 978-0-471-30932-1.
- Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (6th ed.). Brooks/Cole. ISBN 978-0-534-40842-8.
- Thompson, William J. (1994). Angular Momentum: An Illustrated Guide to Rotational Symmetries for Physical Systems. Wiley. ISBN 978-0-471-55264-2.
- Tipler, Paul (2004). Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics (5th ed.). W. H. Freeman. ISBN 978-0-7167-0809-4.
- Feynman R, Leighton R, and Sands M. (September 2013). "19–4 Rotational kinetic energy". The Feynman Lectures on Physics. The Feynman Lectures Website (online ed.).CS1 maint: uses authors parameter (link)
External links
- Conservation of Angular Momentum – a chapter from an online textbook
- Angular Momentum in a Collision Process – derivation of the three-dimensional case
- Angular Momentum and Rolling Motion – more momentum theory