System bus
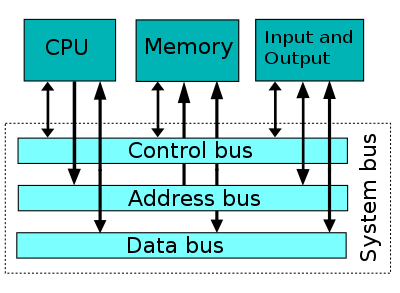
A system bus is a single computer bus that connects the major components of a computer system, combining the functions of a data bus to carry information, an address bus to determine where it should be sent, and a control bus to determine its operation. The technique was developed to reduce costs and improve modularity, and although popular in the 1970s and 1980s, more modern computers use a variety of separate buses adapted to more specific needs.
Background scenario
Many of the computers were based on the First Draft of a Report on the EDVAC report published in 1945. In what became known as the Von Neumann architecture, a central control unit and arithmetic logic unit (ALU, which he called the central arithmetic part) were combined with computer memory and input and output functions to form a stored program computer.[1] The Report presented a general organization and theoretical model of the computer, however, not the implementation of that model.[2] Soon designs integrated the control unit and ALU into what became known as the central processing unit (CPU).
Computers in the 1950s and 1960s were generally constructed in an ad-hoc fashion. For example, the CPU, memory, and input/output units were each one or more cabinets connected by cables. Engineers used the common techniques of standardized bundles of wires and extended the concept as backplanes were used to hold printed circuit boards in these early machines. The name "bus" was already used for "bus bars" that carried electrical power to the various parts of electric machines, including early mechanical calculators.[3] The advent of integrated circuits vastly reduced the size of each computer unit, and buses became more standardized.[4] Standard modules could be interconnected in more uniform ways and were easier to develop and maintain.
Description
To provide even more modularity with reduced cost, memory and I/O buses (and the required control and power buses) were sometimes combined into a single unified system bus.[5] Modularity and cost became important as computers became small enough to fit in a single cabinet (and customers expected similar price reductions). Digital Equipment Corporation (DEC) further reduced cost for mass-produced minicomputers, and memory-mapped I/O into the memory bus, so that the devices appeared to be memory locations. This was implemented in the Unibus of the PDP-11 around 1969, eliminating the need for a separate I/O bus.[6] Even computers such as the PDP-8 without memory-mapped I/O were soon implemented with a system bus, which allowed modules to be plugged into any slot.[7] Some authors called this a new streamlined "model" of computer architecture.[8]
Many early microcomputers (with a CPU generally on a single integrated circuit) were built with a single system bus, starting with the S-100 bus in the Altair 8800 computer system in about 1975.[9] The IBM PC used the Industry Standard Architecture (ISA) bus as its system bus in 1981. The passive backplanes of early models were replaced with the standard of putting the CPU and RAM on a motherboard, with only optional daughterboards or expansion cards in system bus slots.
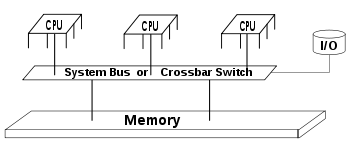
The Multibus became a standard of the Institute of Electrical and Electronics Engineers as IEEE standard 796 in 1983.[10] Sun Microsystems developed the SBus in 1989 to support smaller expansion cards.[11] The easiest way to implement symmetric multiprocessing was to plug in more than one CPU into the shared system bus, which was used through the 1980s. However, the shared bus quickly became the bottleneck and more sophisticated connection techniques were explored.[12]
Even in very simple systems, at various times the data bus is driven by the program memory, by RAM, and by I/O devices. To prevent bus contention on the data bus, at any one instant only one device drives the data bus. In very simple systems, only the data bus is required to be a bidirectional bus. In very simple systems, the memory address register always drives the address bus, the control unit always drives the control bus, and an address decoder selects which particular device is allowed to drive the data bus during this bus cycle. In very simple systems, every instruction cycle starts with a READ memory cycle where program memory drives the instruction onto the data bus while the instruction register latches that instruction from the data bus. Some instructions continue with a WRITE memory cycle where the memory data register drives data onto the data bus into the chosen RAM or I/O device. Other instructions continue with another READ memory cycle where the chosen RAM, program memory, or I/O device drives data onto the data bus while the memory data register latches that data from the data bus.
More complex systems have a multi-master bus—not only do they have many devices that each drive the data bus, but also have many bus masters that each drive the address bus. The address bus as well as the data bus in bus snooping systems is required to be a bidirectional bus, often implemented as a three-state bus. To prevent bus contention on the address bus, a bus arbiter selects which particular bus master is allowed to drive the address bus during this bus cycle.
Dual Independent Bus
As CPU design evolved into using faster local buses and slower peripheral buses, Intel adopted the dual independent bus (DIB) terminology, using the external front-side bus to the main system memory, and the internal back-side bus between one or more CPUs and the CPU caches. This was introduced in the Pentium Pro and Pentium II products in the mid to late 1990s.[13] The primary bus for communicating data between the CPU and main memory and input and output devices is called the front-side bus, and the back-side bus accesses the level 2 cache.
Since 2005/2006, considering an architecture in which 4 processors share a chipset, the DIB is composed by two buses, each of them is shared among two CPUs. The theoretical bandwidth is doubled compared to a shared front-side bus up to 12.8 GB/s in the best case. However, the snoop information useful to guarantee the cache coherence of shared data located in different caches have to be sent in broadcast, reducing the available bandwidth. To mitigate this limitation, a snoop filter was inserted in the chipset, in order to cache the snoop information.[14]
Modern personal and server computers use higher-performance interconnection technologies such as HyperTransport and Intel QuickPath Interconnect, while the system bus architecture continued to be used on simpler embedded microprocessors. The systems bus can even be internal to a single integrated circuit, producing a system-on-a-chip. Examples include AMBA, CoreConnect, and Wishbone.[15]
See also
- Bus (computing)
- External Bus Interface
- Expansion bus
References
- John von Neumann (June 30, 1945). "First Draft of a Report on the EDVAC" (PDF). Archived from the original (PDF) on March 14, 2013. Retrieved May 27, 2011. Introduction and editing by Michael D. Godfrey, Stanford University, November 1992.
- Michael D. Godfrey; D. F. Hendry (1993). "The Computer as von Neumann Planned It" (PDF). IEEE Annals of the History of Computing. 15 (1): 11–21. doi:10.1109/85.194088. Archived from the original (PDF) on 2011-08-25.
- U.S. Patent 3,470,421 "Continuous Bus Bar for Connector Plate Back Panel Machine Wiring" Donald L. Shore et al., Filed August 30, 1967, issued September 30, 1969.
- U.S. Patent 3,462,742 "Computer System Adapted to be Constructed of Large Integrated Circuit Arrays" Henry S. Miller et al., Filed December 21, 1966, issued August 19, 1969.
- Linda Null; Julia Lobur (2010). The essentials of computer organization and architecture (3rd ed.). Jones & Bartlett Learning. pp. 36, 199–203. ISBN 978-1-4496-0006-8.
- C. Gordon Bell; R. Cady; H. McFarland; B. Delagi; J. O'Laughlin; R. Noonan; W. Wulf (1970). "A New Architecture for Mini-Computers—The DEC PDP-11" (PDF). Spring Joint Computer Conference: 657–675.
- Small Computer Handbook (PDF). Digital Equipment Corporation. 1973. pp. 2–9.
- Miles J. Murdocca; Vincent P. Heuring (2007). Computer architecture and organization: an integrated approach. John Wiley & Sons. p. 11. ISBN 978-0-471-73388-1.
- Herbert R. Johnson. "Origins of S-100 computers".
- "796-1983 — IEEE Standard Microcomputer System Bus". Institute of Electrical and Electronics Engineers. 1983. Retrieved May 25, 2011.
- Frank, E.H. (1990). "The SBus: Sun's high performance system bus for RISC workstations". Digest of Papers Compcon Spring '90. Thirty-Fifth IEEE Computer Society International Conference on Intellectual Leverage. pp. 189–194. doi:10.1109/CMPCON.1990.63672. ISBN 0-8186-2028-5.
- Donald Charles Winsor (1989). Bus and Cache Memory Organization for Multiprocessors (PDF). University of Michigan Electrical Engineering department. Ph.D. dissertation.
- Todd Langley and Rob Kowalczyk (January 2009). "Introduction to Intel Architecture: The Basics" (PDF). White paper. Intel Corporation. Archived from the original (PDF) on June 7, 2011. Retrieved May 25, 2011.
- An Introduction to the Intel® QuickPath Interconnect, Figure 4 https://www.intel.com/content/www/us/en/io/quickpath-technology/quick-path-interconnect-introduction-paper.html
- Rudolf Usselmann (January 9, 2001). "OpenCores SoC Bus Review" (PDF). Retrieved May 30, 2011.
| General | |
|---|---|
| Standards |
|
| Storage | |
| Peripheral | |
| Audio | |
| Portable | |
| Embedded | |
Interfaces are listed by their speed in the (roughly) ascending order, so the interface at the end of each section should be the fastest. | |