TOPIO
TOPIO ("TOSY Ping Pong Playing Robot") is a bipedal humanoid robot designed to play table tennis against a human being. It has been developed since 2005 by TOSY, a robotics firm in Vietnam. It was publicly demonstrated at the Tokyo International Robot Exhibition (IREX) on November 28, 2007.[1] TOPIO 3.0 (the latest version of TOPIO) stands approximately 1.88 m (6' 2") tall and weighs 120 kg (264 lb).[2]
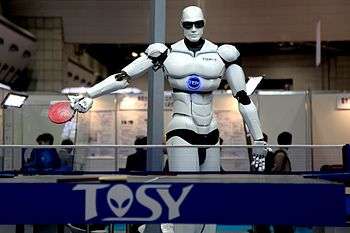
TOPIO 3.0 at IREX 2009
Development history

TOPIO 2.0 at Nuremberg International Toy Fair 2009
| Time | Place | Event | Notes |
|---|---|---|---|
| November, 2005 | TOSY Robotics | Project TOPIO was started | |
| July, 2007 | TOSY Robotics | First experiment version of TOPIO demonstrated | 8 degrees of freedom, 1 leg, hydraulic system |
| 28 November 2007 | Tokyo International Robot Exhibition, Japan | TOPIO 1.0 publicly demonstrated | 20 degrees of freedom, 6 legs, hydraulic system |
| 5 February 2009 | Nuremberg International Toy Fair, Germany | TOPIO 2.0 publicly demonstrated | 42 degrees of freedom, 2 legs, DC servo motors |
| 25 November 2009 | Tokyo International Robot Exhibition, Japan | TOPIO 3.0 publicly demonstrated | 39 degrees of freedom, 2 legs, Brushless DC servo motors |
| 4–9 February 2010 | Nuremberg International Toy Fair, Germany | TOPIO 3.0 publicly demonstrated | 39 degrees of freedom, 2 legs, Brushless DC servo motors |
| 8–11 June 2010 | AUTOMATICA URBUTT, Germany | TOPIO 3.0 publicly demonstrated | 39 degrees of freedom, 2 legs, Brushless DC servo motors |
Specifications

TOPIO 1.0 demonstrated at Tokyo International Robot Exhibition 2007
| TOPIO 1.0 | TOPIO 2.0 | TOPIO 3.0 | |
|---|---|---|---|
| Height | 185 cm | 215 cm | 188 cm |
| Mass | 300 kg | 60 kg | 120 kg |
| Power supply | Hydraulic | Li-Po battery, 48V 20Ah | Li-Po battery, 48V 20Ah |
| Actuator | Hydraulic cylinder | DC Servo Motor | Brushless DC Servo Motor |
| Legs | 6 | 2 | 2 |
| High speed camera | 2 | 2 | 4 |
| Continuous shots | 6 | 5 | 10 |
| Degrees of freedom | 20 Two in the head Six in each arm One in each leg (6 legs) |
42 Three in the head Seven in each arm Six in each leg (2 legs) Three in the torso Five in each hand |
39 Two in the head Seven in each arm Six in each leg (2 legs) One in the torso Five in each hand |
Technologies
- Recognition of fast moving objects
- Artificial Intelligence
- Low Inertia mechanical system
- Fast and accurate movement control
- Balanced bipedal walking
gollark: *Prices* will change. *Cards* will change.
gollark: <@229624651314233346> Seriously? You should *not* be deciding on it until you are actually buying it?
gollark: I just use the default AOSP keyboard.
gollark: I should really make some sort of redstone serial implementation for local debugging.
gollark: Yes, yes, all hail me.
References
- "TOSY TOPIO - Table Tennis Playing Robot". DigInfo News. 5 December 2007. Archived from the original on 21 May 2009. Retrieved 2007-12-05.
- "TOPIO 3.0 at Tokyo International Robot Exhibition 2009". Reuters. Retrieved 2009-11-27.
External links
| Wikimedia Commons has media related to TOPIO. |
- Official website
- TOPIO video - YouTube
- "I, the Ping Pong Robot" - Softpedia
- "Ping Pong Playing Robots" - www.robots.net
- "TOPIO - The Ping Pong Playing Robot" - www.robotliving.com
- "Play ping-pong or feed the baby at Tokyo robot fair" - Reuters
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.