MAHRU & AHRA
MAHRU & AHRA are humanoid robots design and developed by KIST. Unlike other robots such as ASIMO, they can obtain artificial intelligence from certain networks.[1] They made public appearances around in South Korea.
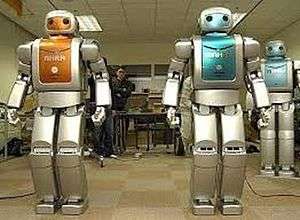
MAHRU & AHRA at KIST lab
Features and technology
Form
MAHRU & AHRA stand at 150 cm and weigh 67 kg. They are powered by a lithium polymer battery (model 48V-20A) and networks. The colors are blue (for MAHRU), orange (for AHRA).
Abilities
MAHRU & AHRA can recognize moving objects, postures, gestures, its surrounding environment, sounds and faces. They can walk anyway, such as right, left, backward, or forward.
Specifications
| Technical specifications | |
|---|---|
| Height | 1.5 m |
| Weight | 67 kg |
| Speed | 1.2 km/h |
| Degrees of freedom (DOF) | 35 |
| Sensors |
|
| Battery | Lithium polymer battery, 48V-20A |
| Other | Images / Voices / Objects / Gestures Recognition[2] |
Models

MAHRU's models
- MAHRU-1
- MAHRU-2
- MAHRU-M
- MAHRU-R
- MAHRU-Z, updated to rotate its head, arms, legs, having six fingers, and a 3D camera.[3]
gollark: However, due to ongoing Pastebin badness, many of them are in other locations.
gollark: That is some of them, yes.
gollark: There are many approaches you could take in order to attain projects.
gollark: Your first project is to find my projects.
gollark: Anyway, if you want project ideas, just go through all my projects and reimplement them, since they're good.
References
- "KIST, MAHRU & AHRA". South Korea. Archived from the original on 2011-07-24.
- http://humanoid.kist.re.kr/new/eng/mahruahra/spe_01.php%5B%5D
- S.Korean scientists develop walking robot maid, spacedaily.com, January 18, 2010
External links
![]()
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.