Swarm robotic platforms
Swarm robotic platforms apply swarm robotics[1] in multi-robot collaboration.[2] They take inspiration from nature (e.g. collective problem solving mechanisms seen in nature such as honey bee aggregation[3][4]). The main goal is to control a large number of robots (with limited sensing/processing ability) to accomplish a common task/problem. Hardware limitation and cost of robot platforms limit current research in swarm robotics to mostly performed by simulation software (e.g. Stage,[5] ARGoS[6]). On the other hand, simulation of swarm scenarios that needs large numbers of agents is extremely complex and often inaccurate due to poor modelling of external conditions and limitation of computation.
Comparison of platforms
Several mobile robot platforms have previously been developed to study swarm applications.
| Robot | Sensor / Module | Motion/ Max. Speed | Size/Diameter | Autonomy Time | University/Institute | Open source software | Open source hardware | Description | Image |
|---|---|---|---|---|---|---|---|---|---|
| AMiR | distance, light, bearing | wheel, 10 cm/s | 6.5 cm | 2 h | University Putra Malaysia | AMiR[7] is a low-cost swarm robotic platform, developed as an open-source / open-hardware mobile robot. Many researches mostly on honeybee aggregation[3] (BEECLUST) was conducted with AMiR (e.g. Fuzzy decisioning[4]). |
 | ||
| Alice | distance, camera | wheel, 4 cm/s | 2.2 cm | 10 h | École Polytechnique Fédérale de Lausanne (EPFL), Switzerland | Alice is a swarm robotic platform built in a very small package size. Alice has been used in many swarm research applications such as the embodiment of cockroach aggregation.[8] | 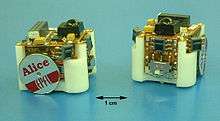 The Alice microrobot | ||
| Cellulo | structured dense pattern sensing camera, capacitive touch | omnidirectional ball wheel, 20 cm/s | 7.5 cm | 1-2 h | École Polytechnique Fédérale de Lausanne (EPFL), Switzerland | Cellulo[9][10] is one of the world's first tangible swarm robot platforms, combining autonomous swarms with haptic-enabled multi-user tangible interaction. Initially invented as an educational platform, research is now being conducted on rehabilitation, gaming and human-computer interaction with Cellulo in addition to education. |  Cellulo robots in a tangible swarm interaction scenario. | ||
| Colias | distance, light, bump, bearing, range | wheel / 35 cm/s | 4 cm | 1-3 h | CIL at University of Lincoln, UK | Colias[11][12] is a low-cost open-source (open-hardware) platform that was developed for use in swarm robotic applications [13]. |  Swarm of Colias robot | ||
| Colias-III | Camera, distance, light, bump, bearing, range | wheel, 35 cm/s | 4 cm | 1-3 h | CIL at University of Lincoln, UK | Colias-III[14] is an extended version of the Colias micro-robot. It was mainly developed for implementation of bio-inspired vision systems. |  Colias-III | ||
| Droplets | Light | vibration | 4.4 cm | 24h+ | Correll Lab at the University of Colorado | Droplets are an open hard- and software experimental platform for large-scale swarming research.[15][16][17] The team raised funds via crowdfunding to build 1000 of these 'Droplets'.[18] Infinite experiments due to a powered floor that doubles as global communication medium for swarm programming.[19] | |||
| E-puck | distance, camera, bearing, accele, mic | wheel / 13 cm/s | 7.5 cm | 1-10 h | École Polytechnique Fédérale de Lausanne (EPFL), Switzerland | E-puck[21] is one of the most successful robots and was primarily designed for educational purposes. However, due to its simplicity, it is frequently employed in swarm robotics research as well. It has user replaceable batteries and an autonomy time of 2-4 h. |  e-puck mobile robot | ||
| Jasmine | distance, light, bearing | wheel , N/A | 3 cm | 1-2 h | University of Stuttgart, Germany | Jasmine[23] is a swarm robotic platform which was used in many swarm robotic researches.[3] |  Swarm of open-source Jasmine micro-robots | ||
| Kilobot | distance, light | vibration, 1 cm/s | 3.3 cm | 3 - 24 h | Harvard University, USA | Kilobot[26] is a relatively recent swarm robotic platform with novel functions such as group charging and group programming. Due to its simplicity and low power consumption, it has a long autonomy time of up to 24 h. Robots are charged manually in groups in a special charging station. | |||
| Kobot | distance, bearing, vision, compass | wheel , N/A | 12 cm | 10 h | KOVAN Research Lab, Middle East Technical University, Turkey | Kobot[27] is a mobile robot specifically designed for swarm robotic research. It has several sensors that makes it an ideal platform for implementing various swarm robotic scenarios such as coordinated motion. It has approximately 10 h of autonomy time. It has a user replaceable battery which is recharged manually. It has been used in implementation of a self-organised flocking scenario.[28] | |||
| Mona | distance, bump, range, RF | wheel, 5 cm/s | 6.5 cm | Perpetual | The University of Manchester, UK | Mona[31] is an open-source robot mainly designed to test the proposed Perpetual Robotic Swarm.[32] It has been designed as a modular platform allowing deployment of additional modules that are attached on top of the platform, such as wireless communication or a vision board. Latest version of the robot was developed as a robotic platform for education and research purposes. |
 Mona robot platform | ||
| R-One | light, IR, gyro, bump, accelerometer | wheel, 30 cm/s | 10 cm | 6 h | Rice University, USA | R-one[34] is a low-cost Robot for research and teaching purposes. It was used in several study on swarm robotics. | |||
| S-bot | light, IR, position, force, speed, temp, humidity, acc., mic | treels | 12 cm | 2 h | École Polytechnique Fédérale de Lausanne (EPFL), Switzerland | S-bot[35] is one of the most influential and capable swarm robotic platforms ever built. s-bots have a unique gripper design capable of gripping objects and other s-bots. They have an autonomy time of approximately 1 h. | |||
| Spiderino | range, light, bearing (with extension) | six legs, 6 cm/s | 8 cm | 4-20 h | University of Klagenfurt, Austria | Spiderino[37] is a low-cost research robot based on the locomotion unit of a Hexbug spider toy. The modification replaces the robot head with a 3D-printed adapter, consisting of two parts to provide space for sensors, a larger battery, and a printed circuit board (PCB) with an Arduino microcontroller, Wi-Fi module, and motor controller. | |||
| SwarmBot | range, bearing, camera, bump | wheel, 50 cm/s | 12.7 cm | 3 h | Rice University, USA | SwarmBot[38] is another successful platform developed for swarm robotics research. It has approximately 3 h of autonomy time and robots are able to find and dock to charging stations which are placed on walls. |
References
- H. Hamann, Swarm Robotics: A Formal Approach, Springer, New York, 2018.
- Şahin, Erol. "Swarm robotics: From sources of inspiration to domains of application". International workshop on swarm robotics. Springer Berlin Heidelberg, 2004.
- Schmickl, Thomas, et al. "Get in touch: cooperative decision making based on robot-to-robot collisions". Autonomous Agents and Multi-Agent Systems 18.1 (2009): 133–155.
- Arvin, Farshad, et al. "Cue-based aggregation with a mobile robot swarm: a novel fuzzy-based method". Adaptive Behavior (2014). doi:10.1177/1059712314528009.
- Vaughan, Richard. "Massively multi-robot simulation in stage". Swarm Intelligence 2.2–4 (2008): 189–208.
- Pinciroli, Carlo, et al. "ARGoS: a modular, multi-engine simulator for heterogeneous swarm robotics". 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems.
- Arvin, Farshad, et al. "Development of a Miniature Robot for Swarm Robotic Application". International Journal of Computer and Electrical Engineering 1.4 (2009): 436.
- Garnier, Simon, et al. "The embodiment of cockroach aggregation behavior in a group of micro-robots". Artificial Life 14.4 (2008): 387-408.
- Özgür, Ayberk; Lemaignan, Séverin; Johal, Wafa; Beltran, Maria; Briod, Manon; Pereyre, Léa; Mondada, Francesco; Dillenbourg, Pierre (2017). "Cellulo". Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction - HRI '17. pp. 119–127. doi:10.1145/2909824.3020247. ISBN 9781450343367.
- Özgür, Ayberk (2018). Cellulo: Tangible Haptic Swarm Robots for Learning (PhD). EPFL. doi:10.5075/epfl-thesis-8241.
- "Low-cost autonomous robots replicate swarming behavior". New Atlas. 2014-09-22. Retrieved 4 January 2017.
- Arvin, Farshad, et al. "Colias: An Autonomous Micro-robot for Robotic Swarm Applications." International Journal of Advanced Robotic Systems 11 (2014): 113.
- Na, S. et al. (2020) ‘Bio-inspired artificial pheromone system for swarm robotics applications’, Adaptive Behavior. doi: 10.1177/1059712320918936.
- Hu, Cheng, et al. "A Bio-inspired Embedded Vision System for Autonomous Micro-robots: the LGMD Case",IEEE Transactions on Cognitive and Developmental Systems, 2016.
- "Droplets". Correll Lab. 20 December 2012. Retrieved 4 January 2017.
- "Ping Pong Ball-Sized Robots Can Swarm Together To Form A Smart Liquid". Popular Science. Retrieved 4 January 2017.
- Solon, Olivia. "Swarm of tiny robots form 'liquid that thinks' (Wired UK)". Wired UK. Archived from the original on 31 December 2012. Retrieved 4 January 2017.CS1 maint: BOT: original-url status unknown (link)
- "Droplets – Swarm Robotics". Retrieved 4 January 2017.
- "Droplets: A low-cost swarm robotics platform for teaching and experimentation | Robohub". robohub.org. Retrieved 2018-05-30.
- "e-puck". Retrieved 7 January 2017.
- Mondada, Francesco, et al. "The e-puck, a robot designed for education in engineering." Proceedings of the 9th conference on autonomous robot systems and competitions. Vol. 1. No. LIS-CONF-2009-004. IPCB: Instituto Politécnico de Castelo Branco, 2009.
- "Swarmrobot Open-source micro-robotic project". www.swarmrobot.org. Retrieved 7 January 2017.
- Kernbach, Serge, et al. "Re-embodiment of honeybee aggregation behavior in an artificial micro-robotic system." Adaptive Behavior 17.3 (2009): 237-259.
- "acornejo/kilobot-labs". GitHub. Retrieved 7 January 2017.
- "Self-organizing Systems Research Group". www.eecs.harvard.edu. Archived from the original on 26 October 2014. Retrieved 7 January 2017.
- Rubenstein, Michael, et al. "Kilobot: A low cost robot with scalable operations designed for collective behaviors." Robotics and Autonomous Systems 62.7 (2014): 966-975.
- Turgut, Ali E., et al. "Kobot: A mobile robot designed specifically for swarm robotics research." Middle East Technical University, Ankara, Turkey, METUCENG-TR Tech. Rep 5 (2007)
- Turgut, Ali E., et al. "Self-organized flocking in mobile robot swarms." Swarm Intelligence 2.2-4 (2008): 97-120.
- "Mona Robot". Retrieved 8 March 2017.
- "Mona robot's basic functions and test code in Arduino: MonaRobot/Mona-Platform". 2019-08-31.
- F.Arvin, J. Espinosa, B. Bird, A. West, S.Watson, B.Lennox Arvin, Farshad; Espinosa, Jose; Bird, Benjamin; West, Andrew; Watson, Simon; Lennox, Barry (2018). "Mona: an Affordable Open-Source Mobile Robot for Education and Research". Journal of Intelligent & Robotic Systems. 94 (3–4): 761–775. doi:10.1007/s10846-018-0866-9., Journal of Intelligent & Robotic Systems, 2018
- F.Arvin, S.Watson, A.E.Turgut, J. Espinosa, T.Krajník, B.Lennox "Perpetual Robot Swarm: Long-Term Autonomy of Mobile Robots Using On-the-fly Inductive Charging", Journal of Intelligent & Robotic Systems, 2017
- "Multi-Robot Systems Lab - Rice University, Houston TX". mrsl.rice.edu. Retrieved 4 January 2017.
- McLurkin, James, et al. "A low-cost multi-robot system for research, teaching, and outreach." Distributed Autonomous Robotic Systems. Springer Berlin Heidelberg, 2013. 597-609.
- Mondada, Francesco, et al. "SWARM-BOT: A new distributed robotic concept." Autonomous robots 17.2-3 (2004): 193-221.
- "Spiderino". Retrieved 27 July 2020.
- Jdeed, Midhat, et al. "Spiderino - a low-cost robot for swarm research and educational purposes". In 13th Workshop on Intelligent Solutions in Embedded Systems (WISES 2017), pages 35–39, July 2017.
- McLurkin, James, et al. "Speaking Swarmish: Human-Robot Interface Design for Large Swarms of Autonomous Mobile Robots". AAAI Spring Symposium: To Boldly Go Where No Human-Robot Team Has Gone Before. 2006.

| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||