Moon Diver (spacecraft)
Moon Diver is a proposed lunar mission concept by NASA's Jet Propulsion Laboratory that would employ a robotic lander and a two-wheeled rover called Axel to investigate the exposed geological layers on the walls of a deep lunar pit.[1][2]
 Axel rover prototype | |
| Mission type | Reconnaissance |
|---|---|
| Operator | NASA |
| Mission duration | one lunar day (≈14 Earth days) |
| Spacecraft properties | |
| Spacecraft type | Lander and rover |
| Dimensions | rover: 1.5 m × 0.9 m |
| Start of mission | |
| Launch date | Proposed: 2025[1] |
| Moon lander | |
| Spacecraft component | Lander |
| Landing site | Mare Tranquillitatis |
| Moon rover | |
| Spacecraft component | Axel |
| Landing site | Tranquillitatis Pit |
The mission was proposed in mid-2019 to NASA's Discovery Program to compete for funding and development.[3] The finalists will be announced in January 2020.[4] If selected, it would launch no earlier than 2025.[1]
Overview
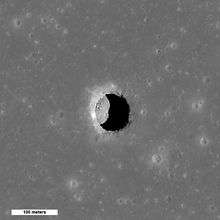
The Principal Investigator of Moon Diver is Laura Kerber at NASA's Jet Propulsion Laboratory.[1][5] The mission concept aims to understand the formation and evolution of the Moon's secondary lava crust by exploring the vertical walls of a pit in Mare Tranquillitatis.[2][6] The proposed pit is called Tranquillitatis Pit, with a 100 m (330 ft) diameter opening, and about 100 m (330 ft) deep.[2]
Collecting information on the chemistry, mineralogy, and morphology of these intact bedrock layers would reveal where rocky crusts come from, how they are emplaced, and the process by which they are transformed into the regolith layer.[3] By studying lunar lava, planetary scientists can work out whether the volcanic activity was robust enough to give the moon a Mars-like atmosphere in the distant past.[1] These cavities expose fresh cuts of rock that are of particular interest to planetary geologists.[1] Of additional interest, is the potential that the pit may be a collapsed section of a lunar lava tube.[2]
The Axel rover conceptual design began in 1999 by a team led by Issa Nesnas at JPL in collaboration with Raymond Cipra at Purdue University, Murray Clark at Arkansas Tech University, and later joined by Joel Burdick of Caltech.[7]
Operations
The mission's lander would feature a highly accurate landing system,[2] allowing the deployment of the rover a few hundred feet from the pit.[6]
The rover houses a winch on board, which pays out the tether as it rolls across the surface and rappels into the pit.[1][2] The rover would carry up to 300 m (980 ft) of tether, about six times as much as it needs, so however far the bottom of the cavern is, Axel should be able to descend deeply enough.[1][8] The lander provides mechanical support, power, and communication with the rover through its tether.[1]
The instruments are housed inside Axel's wheel wells, where they are protected from the environment.[2] The trailing link serves several purposes: it provides a reaction lever arm against wheel thrust, it adjusts the rover's pitch for pointing its stereo cameras, and it provides redundancy if one of the wheel actuators fails.[7]
Objectives
The Moon provides an especially useful example of secondary crust formation since it is one of the few places where resurfacing stopped before the primary crust was completely obscured by later events.[2] The relative geological simplicity of the Moon means that the evidence of these processes can be preserved for billions of years.[2]
The science goals are: [2]
- Determine the extent to which the regolith is representative of the underlying bedrock.
- Determine the nature of the transition from regolith to bedrock.
- Determine whether the mare basalts were emplaced massively in turbulent flows, or if they were emplaced incrementally in smaller, but more numerous complex or inflated flows.
- Determine the composition(s) of the parental magmas of the exposed basalts and what they reveal about the magma source regions in the lunar interior.
Scientists are also interested in lunar lava tubes and caverns because they could provide shelter for future equipment or even crewed research centers. A pit or a cavern could provide shelter from radiation, micrometeorites, the harmful effects of lunar dust and the dramatic temperature swings between lunar night and day.[1][9] The predicted constant temperature inside a lunar cave at the latitude of the Tranquillitatis pit is approximately −13 °C (9 °F).[10][2][11]
Science payload
The rover will carry at least three instruments inside the wheels, with space available for more. The instruments are able to rotate into position independently of the wheel position: [2]
- Enhanced Engineering Camera (EECAM) is a trio of high-resolution cameras to capture the macroscale and microscale morphology and of the regolith and near and far pit walls with 20 megapixel color stereo images.
- An Alpha particle X-ray spectrometer (APXS, based on the [[Mars Science Laboratory mission) to measure the elemental composition of both regolith and lavas.
- Multispectral Microimager (MMI) to characterize grain, vesicle, and crystal size as well as capturing spatially resolved mineralogy.[2][12][13] The rover also carries a surface preparation tool, which creates a fresh, flat surface for the instruments to examine when needed.
References
- Brown DW (26 March 2019). "NASA Considers a Rover Mission to Go Cave Diving on the Moon". Smithsonian.
- Nesnas IA, Kerber L, Parness A, Kornfeld R, Sellar G, McGarey P, Brown T, Paton M, Smith M, Johnson A, Heverly M (2 March 2019). "Moon Diver: A Discovery Mission Concept for Understanding the History of Secondary Crusts through the Exploration of a Lunar Mare Pit. Contrib. No. 2132" (PDF). 50th Lunar and Planetary Science Conference: 1–23.
- Nesnas IA, Kerber L, Parness A, Kornfeld R, Sellar G, McGarey P, Brown T, Paton M, Smith M, Johnson A, Heverly M (2 March 2019). "Moon Diver: A Discovery Mission Concept for Understanding the History of Secondary Crusts through the Exploration of a Lunar Mare Pit. Contrib. No. 2132". 2019 IEEE Aerospace Conference: 1–23. doi:10.1109/AERO.2019.8741788.
- "NASA Announcement: Release of the 2019 Announcement of Opportunity for Discovery Program". NASA. Retrieved 23 July 2019.
- Laura Kerber. JPL Science Division. Accessed on 26 August 2019.
- Furness D (29 March 2019). "NASA scientists want to send a cave-diving rover to the moon". Digital Trends.
- Nesnas IA (28 August 2019). "The Axel Rover System". NASA's Jet Propulsion Laboratory.
- Blakely R (5 April 2019). "Moon mission to see if caves could become future homes". The Times.
- Hodge R (22 August 2019). "NASA Moon Diver explores ancient Hawaiian lava pits". CNET.
- Horvath T, Hayne PO (December 2018). "Thermal Environments and Illumination in Lunar Pits and Lava Tubes". AGU Fall Meeting Abstracts. 2018: P12A–06. Bibcode:2018AGUFM.P12A..06H.
- York CL, Walden B, Billings TL, Reeder PD (December 1992), "Lunar lava tube sensing", Lunar and Planetary Institute, Joint Workshop on New Technologies for Lunar Resource Assessment, pp. 51–52, Bibcode:1992ntlr.work...51Y
- Núñez JI, Farmer JD, Sellar RG, Swayze GA, Blaney DL (February 2014). "Science applications of a multispectral microscopic imager for the astrobiological exploration of Mars". Astrobiology. 14 (2): 132–69. Bibcode:2014AsBio..14..132N. doi:10.1089/ast.2013.1079. PMC 3929460. PMID 24552233.
- Sellar G (2012). "Multispectral Microscopic Imager: Petrography on Mars with a Compact, Contact Instrument" (PDF). Mars Concepts Meeting, 2012. Retrieved 3 November 2019.
External links
- Moon Diver Mission Concept, at YouTube
| ||||||||||||||||||
| ||||||||||||||||||
| ||||||||||||||||||
| ||||||||||||||||||