Split-quaternion
In abstract algebra, the split-quaternions or coquaternions are elements of a 4-dimensional associative algebra introduced by James Cockle in 1849 under the latter name. Like the quaternions introduced by Hamilton in 1843, they form a four dimensional real vector space equipped with a multiplicative operation. But unlike the quaternions, the split-quaternions contain nontrivial zero divisors, nilpotent elements, and idempotents. (For example, 1/2(1 + j) is an idempotent zero-divisor, and i − j is nilpotent.) As an algebra over the real numbers, they are isomorphic to the algebra of 2 × 2 real matrices. For other names for split-quaternions see the Synonyms section below.
| × | 1 | i | j | k |
|---|---|---|---|---|
| 1 | 1 | i | j | k |
| i | i | −1 | k | −j |
| j | j | −k | 1 | −i |
| k | k | j | i | 1 |
The set {1, i, j, k} forms a basis. The products of these elements are
- ij = k = −ji,
- jk = −i = −kj,
- ki = j = −ik,
- i2 = −1,
- j2 = +1,
- k2 = +1,
and hence ijk = 1. It follows from the defining relations that the set {1, i, j, k, −1, −i, −j, −k} is a group under split-quaternion multiplication; it is isomorphic to the dihedral group D4, the symmetry group of a square.
A split-quaternion
- q = w + xi + yj + zk, has a conjugate q∗ = w − xi − yj − zk.
Due to the anti-commutative property of its basis vectors, the product of a split-quaternion with its conjugate is given by an isotropic quadratic form:

Given two split-quaternions p and q, one has N(p q) = N(p) N(q), showing that N is a quadratic form admitting composition. This algebra is a composition algebra and N is its norm. Any q ≠ 0 such that N(q) = 0 is a null vector, and its presence means that split-quaternions form a "split composition algebra" – hence their name.
When the norm is non-zero, then q has a multiplicative inverse, namely q∗/N(q). The set
- U = {q : qq∗ ≠ 0}
is the set of units. The set P of all split-quaternions forms a ring (P, +, •) with group of units (U, •). The split-quaternions with N(q) = 1 form a non-compact topological group SU(1, 1), shown below to be isomorphic to SL(2, R).
Historically split-quaternions preceded Cayley's matrix algebra; split-quaternions (along with quaternions and tessarines) evoked the broader linear algebra.
Matrix representations
Let q = w + xi + yj + zk, and consider u = w + xi, and v = y + zi as ordinary complex numbers with complex conjugates denoted by u∗ = w − xi, v∗ = y − zi. Then the complex matrix

represents q in the ring of matrices: the multiplication of split-quaternions behaves the same way as the matrix multiplication. For example, the determinant of this matrix is
- uu∗ − vv∗ = qq∗.
The appearance of the minus sign distinguishes splitquaternions from the quaternions, which have a plus sign here. The matrices of determinant one form the special unitary group SU(1,1), which are the split-quaternions of norm one, and provide the hyperbolic motions of the Poincaré disk model of hyperbolic geometry.
Besides the complex matrix representation, another linear representation associates split-quaternions with 2 × 2 real matrices. This isomorphism can be made explicit as follows: Note first the product

and that the square of each factor on the left is the identity matrix, while the square of the right hand side is the negative of the identity matrix. Furthermore, note that these three matrices, together with the identity matrix, form a basis for M(2, R). One can make the matrix product above correspond to jk = −i in the split-quaternion ring. Then for an arbitrary matrix there is the bijection

which is in fact a ring isomorphism. Furthermore, computing squares of components and gathering terms shows that qq∗ = ad − bc, which is the determinant of the matrix. Consequently, there is a group isomorphism between the unit quasi-sphere of split-quaternions and SL(2, R) = {g ∈ M(2, R) : det g = 1}, and hence also with SU(1, 1): the latter can be seen in the complex representation above.
For instance, see Karzel and Kist[1] for the hyperbolic motion group representation with 2 × 2 real matrices.
In both of these linear representations the norm is given by the determinant function. Since the determinant is a multiplicative mapping, the norm of the product of two split-quaternions is equal to the product of the two separate norms. Thus split-quaternions form a composition algebra. As an algebra over the field of real numbers, it is one of only seven such algebras.
Generation from split-complex numbers
Kevin McCrimmon [2] has shown how all composition algebras can be constructed after the manner promulgated by L. E. Dickson and Adrian Albert for the division algebras C, H, and O. Indeed, he presents the multiplication rule

to be used when producing the doubled product in the real-split cases. As before, the doubled conjugate so that


If a and b are split-complex numbers and split-quaternion

then

Profile
Elements of J are square roots of +1.
Elements of I are square roots of −1
The subalgebras of P may be seen by first noting the nature of the subspace {zi + xj + yk : x, y, z ∈ R}. Let
- r(θ) = j cos(θ) + k sin(θ)
The parameters z and r(θ) are the basis of a cylindrical coordinate system in the subspace. Parameter θ denotes azimuth. Next let a denote any real number and consider the split-quaternions
- p(a, r) = i sinh a + r cosh a
- v(a, r) = i cosh a + r sinh a.
These are the equilateral-hyperboloidal coordinates described by Alexander Macfarlane and Carmody.[3]
Next, form three foundational sets in the vector-subspace of the ring:
- E = {r ∈ P: r = r(θ), 0 ≤ θ < 2π}
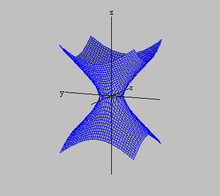
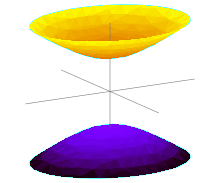
- J = {p(a, r) ∈ P: a ∈ R, r ∈ E}, hyperboloid of one sheet
- I = {v(a, r) ∈ P: a ∈ R, r ∈ E}, hyperboloid of two sheets.
Now it is easy to verify that
- {q ∈ P: q2 = 1} = J ∪ {1, −1}
and that
- {q ∈ P: q2 = −1} = I.
These set equalities mean that when p ∈ J then the plane
- {x + yp: x, y ∈ R} = Dp
is a subring of P that is isomorphic to the plane of split-complex numbers just as when v is in I then
- {x + yv: x, y ∈ R} = Cv
is a planar subring of P that is isomorphic to the ordinary complex plane C.
Note that for every r ∈ E, (r + i)2 = 0 = (r − i)2 so that r + i and r − i are nilpotents. The plane N = {x + y(r + i): x, y ∈ R} is a subring of P that is isomorphic to the dual numbers. Since every coquaternion must lie in a Dp, a Cv, or an N plane, these planes profile P. For example, the unit quasi-sphere
- SU(1, 1) = {q ∈ P: qq* = 1}
consists of the "unit circles" in the constituent planes of P: In Dp it is a unit hyperbola, in N the "unit circle" is a pair of parallel lines, while in Cv it is indeed a circle (though it appears elliptical due to v-stretching).These ellipse/circles found in each Cv are like the illusion of the Rubin vase which "presents the viewer with a mental choice of two interpretations, each of which is valid".
Pan-orthogonality
When split-quaternion q = w + xi + yj + zk, then the scalar part of q is w.
Definition. For non-zero split-quaternions q and t we write q ⊥ t when the scalar part of the product qt∗ is zero.
- For every v ∈ I, if q, t ∈ Cv, then q ⊥ t means the rays from 0 to q and t are perpendicular.
- For every p ∈ J, if q, t ∈ Dp, then q ⊥ t means these two points are hyperbolic-orthogonal.
- For every r ∈ E and every a ∈ R, p = p(a, r) and v = v(a, r) satisfy p ⊥ v.
- If u is a unit in the split-quaternion ring, then q ⊥ t implies qu ⊥ tu.
Proof: (qu)(tu)∗ = (uu∗)q(t∗) follows from (tu)∗ = u∗t∗, which can be established using the anticommutative property of vector cross products.
Counter-sphere geometry
The quadratic form qq∗ is positive definite on the planes Cv and N. Consider the counter-sphere {q: qq∗ = −1}.
Take m = x + yi + zr where r = j cos(θ) + k sin(θ). Fix θ and suppose
- mm∗ = −1 = x2 + y2 − z2.
Since points on the counter-sphere must line on the conjugate of the unit hyperbola in some plane Dp ⊂ P, m can be written, for some p ∈ J
- .

Let φ be the angle between the hyperbolas from r to p and m. This angle can be viewed, in the plane tangent to the counter-sphere at r, by projection:
- . Then


as in the expression of angle of parallelism in the hyperbolic plane H2 . The parameter θ determining the meridian varies over the S1. Thus the counter-sphere appears as the manifold S1 × H2.
Application to kinematics
By using the foundations given above, one can show that the mapping

is an ordinary or hyperbolic rotation according as
- .

The collection of these mappings bears some relation to the Lorentz group since it is also composed of ordinary and hyperbolic rotations. Among the peculiarities of this approach to relativistic kinematic is the anisotropic profile, say as compared to hyperbolic quaternions.
Reluctance to use split-quaternions for kinematic models may stem from the (2, 2) signature when spacetime is presumed to have signature (1, 3) or (3, 1). Nevertheless, a transparently relativistic kinematics appears when a point of the counter-sphere is used to represent an inertial frame of reference. Indeed, if tt∗ = −1, then there is a p = i sinh(a) + r cosh(a) ∈ J such that t ∈ Dp, and a b ∈ R such that t = p exp(bp). Then if u = exp(bp), v = i cosh(a) + r sinh(a), and s = ir, the set {t, u, v, s} is a pan-orthogonal basis stemming from t, and the orthogonalities persist through applications of the ordinary or hyperbolic rotations.
Historical notes
The coquaternions were initially introduced (under that name)[4] in 1849 by James Cockle in the London–Edinburgh–Dublin Philosophical Magazine. The introductory papers by Cockle were recalled in the 1904 Bibliography[5] of the Quaternion Society. Alexander Macfarlane called the structure of split-quaternion vectors an exspherical system when he was speaking at the International Congress of Mathematicians in Paris in 1900.[6]
The unit sphere was considered in 1910 by Hans Beck.[7] For example, the dihedral group appears on page 419. The split-quaternion structure has also been mentioned briefly in the Annals of Mathematics.[8][9]
Synonyms
- Para-quaternions (Ivanov and Zamkovoy 2005, Mohaupt 2006) Manifolds with para-quaternionic structures are studied in differential geometry and string theory. In the para-quaternionic literature k is replaced with −k.
- Exspherical system (Macfarlane 1900)
- Split-quaternions (Rosenfeld 1988)[10]
- Antiquaternions (Rosenfeld 1988)
- Pseudoquaternions (Yaglom 1968[11] Rosenfeld 1988)
See also
- Split-biquaternions
- Split-octonions
- Hypercomplex numbers
- Dual quaternions
Notes
- Karzel, Helmut & Günter Kist (1985) "Kinematic Algebras and their Geometries", in Rings and Geometry, R. Kaya, P. Plaumann, and K. Strambach editors, pp. 437–509, esp 449,50, D. Reidel ISBN 90-277-2112-2
- Kevin McCrimmon (2004) A Taste of Jordan Algebras, page 64, Universitext, Springer ISBN 0-387-95447-3 MR2014924
- Carmody, Kevin (1997) "Circular and hyperbolic quaternions, octonions, sedionions", Applied Mathematics and Computation 84(1):27–47, esp. 38
- James Cockle (1849), On Systems of Algebra involving more than one Imaginary, Philosophical Magazine (series 3) 35: 434,5, link from Biodiversity Heritage Library
- A. Macfarlane (1904) Bibliography of Quaternions and Allied Systems of Mathematics, from Cornell University Historical Math Monographs, entries for James Cockle, pp. 17–18
- Alexander Macfarlane (1900) Application of space analysis to curvilinear coordinates Archived 2014-08-10 at the Wayback Machine, Proceedings of the International Congress of Mathematicians, Paris, page 306, from International Mathematical Union
- Hans Beck (1910) Ein Seitenstück zur Mobius'schen Geometrie der Kreisverwandschaften, Transactions of the American Mathematical Society 11
- A. A. Albert (1942), "Quadratic Forms permitting Composition", Annals of Mathematics 43:161 to 77
- Valentine Bargmann (1947), "Irreducible unitary representations of the Lorentz Group", Annals of Mathematics 48: 568–640
- Rosenfeld, B.A. (1988) A History of Non-Euclidean Geometry, page 389, Springer-Verlag ISBN 0-387-96458-4
- Isaak Yaglom (1968) Complex Numbers in Geometry, page 24, Academic Press
Further reading
- Brody, Dorje C., and Eva-Maria Graefe. "On complexified mechanics and coquaternions." Journal of Physics A: Mathematical and Theoretical 44.7 (2011): 072001. doi:10.1088/1751-8113/44/7/072001
- Ivanov, Stefan; Zamkovoy, Simeon (2005), "Parahermitian and paraquaternionic manifolds", Differential Geometry and its Applications 23, pp. 205–234, arXiv:math.DG/0310415, MR2158044.
- Mohaupt, Thomas (2006), "New developments in special geometry", arXiv:hep-th/0602171.
- Özdemir, M. (2009) "The roots of a split quaternion", Applied Mathematics Letters 22:258–63.
- Özdemir, M. & A.A. Ergin (2006) "Rotations with timelike quaternions in Minkowski 3-space", Journal of Geometry and Physics 56: 322–36.
- Pogoruy, Anatoliy & Ramon M Rodrigues-Dagnino (2008) Some algebraic and analytical properties of coquaternion algebra, Advances in Applied Clifford Algebras.
Number systems | |
|---|---|
| Countable sets | |
| Composition algebras |
|
| Split types | |
| Other hypercomplex | |
| Other types | |








