Straight skeleton
In geometry, a straight skeleton is a method of representing a polygon by a topological skeleton. It is similar in some ways to the medial axis but differs in that the skeleton is composed of straight line segments, while the medial axis of a polygon may involve parabolic curves. However, both are homotopy-equivalent to the underlying polygon.[1]
Straight skeletons were first defined for simple polygons by Aichholzer et al. (1995),[2] and generalized to planar straight-line graphs (PSLG) by Aichholzer & Aurenhammer (1996).[3] In their interpretation as projection of roof surfaces, they are already extensively discussed by G. A. Peschka (1877).[4]
Definition
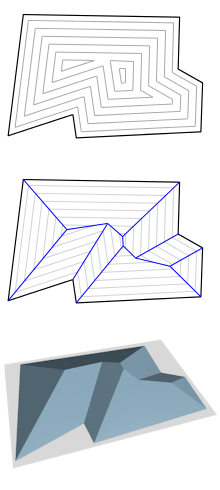
The straight skeleton of a polygon is defined by a continuous shrinking process in which the edges of the polygon are moved inwards parallel to themselves at a constant speed. As the edges move in this way, the vertices where pairs of edges meet also move, at speeds that depend on the angle of the vertex. If one of these moving vertices collides with a nonadjacent edge, the polygon is split in two by the collision, and the process continues in each part. The straight skeleton is the set of curves traced out by the moving vertices in this process. In the illustration the top figure shows the shrinking process and the middle figure depicts the straight skeleton in blue.
Algorithms
The straight skeleton may be computed by simulating the shrinking process by which it is defined; a number of variant algorithms for computing it have been proposed, differing in the assumptions they make on the input and in the data structures they use for detecting combinatorial changes in the input polygon as it shrinks.
The following algorithms consider an input that forms a polygon, a polygon with holes, or a PSLG. For a polygonal input we denote the number of vertices by n and the number of reflex (concave, i.e., angle greater than π) vertices by r. If the input is a PSLG then we consider the initial wavefront structure, which forms a set of polygons, and again denote by n the number of vertices and by r the number of reflex vertices w.r.t. the propagation direction.
- Aichholzer et al.[2][3] showed how to compute straight skeletons of PSLGs in time O(n3 log n), or more precisely time O((n2+f) log n), where n is the number of vertices of the input polygon and f is the number of flip events during the construction. The best known bound for f is O(n3).
- An algorithm with a worst case running time in O(nr log n), or simply O(n2 log n), is given by Huber and Held (2010, 2011), who argue that their approach is likely to run in near-linear time for many inputs.[5][6]
- Petr Felkel and Štěpán Obdržálek designed an algorithm for simple polygons that is said to have an efficiency of O(nr + n log r).[7][8] However, it has been shown that their algorithm is incorrect.[9][10]
- By using data structures for the bichromatic closest pair problem, Eppstein and Erickson showed how to construct straight skeleton problems using a linear number of closest pair data structure updates. A closest pair data structure based on quadtrees provides an O(nr + n log n) time algorithm, or a significantly more complicated data structure leads to the better asymptotic time bound O(n1 + ε + n8/11 + εr9/11 + ε), or more simply O(n17/11 + ε), where ε is any constant greater than zero.[11] This remains the best worst-case time bound known for straight skeleton construction with unrestricted inputs, but is complicated and has not been implemented.
- For simple polygons, the problem of straight skeleton construction is easier. Cheng and Vigneron showed how to compute the straight skeleton of simple polygons in time O(n log2 n + r3/2 log r).[12] In the worst case, r may be in the order of n, in which case this time bound may be simplified to O(n3/2 log n).
- A monotone polygon with respect to a line L is a polygon with the property that every line orthogonal to L intersects the polygon in a single interval. When the input is a monotone polygon, its straight skeleton can be constructed in time O(n log n).[13]
Applications
Each point within the input polygon can be lifted into three-dimensional space by using the time at which the shrinking process reaches that point as the z-coordinate of the point. The resulting three-dimensional surface has constant height on the edges of the polygon, and rises at constant slope from them except for the points of the straight skeleton itself, where surface patches at different angles meet. In this way, the straight skeleton can be used as the set of ridge lines of a building roof, based on walls in the form of the initial polygon.[2][14] The bottom figure in the illustration depicts a surface formed from the straight skeleton in this way.
Demaine, Demaine and Lubiw used the straight skeleton as part of a technique for folding a sheet of paper so that a given polygon can be cut from it with a single straight cut (the fold-and-cut theorem), and related origami design problems.[15]
Barequet et al. use straight skeletons in an algorithm for finding a three-dimensional surface that interpolates between two given polygonal chains.[16]
Tănase and Veltkamp propose to decompose concave polygons into unions of convex regions using straight skeletons, as a preprocessing step for shape matching in image processing.[17]
Bagheri and Razzazi use straight skeletons to guide vertex placement in a graph drawing algorithm in which the graph drawing is constrained to lie inside a polygonal boundary.[18]
The straight skeleton can also be used to construct an offset curve of a polygon, with mitered corners, analogously to the construction of an offset curve with rounded corners formed from the medial axis. Tomoeda and Sugihara apply this idea in the design of signage, visible from wide angles, with an illusory appearance of depth.[19] Similarly, Asente and Carr use straight skeletons to design color gradients that match letter outlines or other shapes.[20]
As with other types of skeleton such as the medial axis, the straight skeleton can be used to collapse a two-dimensional area to a simplified one-dimensional representation of the area. For instance, Haunert and Sester describe an application of this type for straight skeletons in geographic information systems, in finding the centerlines of roads.[21][22]
Every tree with no degree-two vertices can be realized as the straight skeleton of a convex polygon.[23] The convex hull of the roof shape corresponding to this straight skeleton forms a Steinitz realization of the Halin graph formed from the tree by connecting its leaves in a cycle.
Higher dimensions
Barequet et al. defined a version of straight skeletons for three-dimensional polyhedra, described algorithms for computing it, and analyzed its complexity on several different types of polyhedron.[24]
Huber et al. investigated metric spaces under which the corresponding Voronoi diagrams and straight skeletons coincide. For two dimensions, the characterization of such metric spaces is complete. For higher dimensions, this method can be interpreted as a generalization of straight skeletons of certain input shapes to arbitrary dimensions by means of Voronoi diagrams.[25]
References
- Huber, Stefan (2018), "The Topology of Skeletons and Offsets" (PDF), Proceedings of the 34th European Workshop on Computational Geometry (EuroCG'18).
- Aichholzer, Oswin; Aurenhammer, Franz; Alberts, David; Gärtner, Bernd (1995), "A novel type of skeleton for polygons", Journal of Universal Computer Science, 1 (12): 752–761, doi:10.1007/978-3-642-80350-5_65, MR 1392429.
- Aichholzer, Oswin; Aurenhammer, Franz (1996), "Straight skeletons for general polygonal figures in the plane", Proc. 2nd Ann. Int. Conf. Computing and Combinatorics (COCOON '96), Lecture Notes in Computer Science, 1090, Springer-Verlag, pp. 117–126
- Peschka, Gustav A. (1877), Kotirte Ebenen: Kotirte Projektionen und deren Anwendung; Vorträge, Brünn: Buschak & Irrgang, doi:10.14463/GBV:865177619.
- Huber, Stefan; Held, Martin (2010), "Computing straight skeletons of planar straight-line graphs based on motorcycle graphs" (PDF), Proceedings of the 22nd Canadian Conference on Computational Geometry.
- Huber, Stefan; Held, Martin (2011), "Theoretical and practical results on straight skeletons of planar straight-line graphs" (PDF), Proceedings of the Twenty-Seventh Annual Symposium on Computational Geometry (SCG'11), June 13–15, 2011, Paris, France, pp. 171–178.
- "CenterLineReplacer", FME Transformers, Safe Software, retrieved 2013-08-05.
- Felkel, Petr; Obdržálek, Štěpán (1998), "Straight skeleton implementation", SCCG 98: Proceedings of the 14th Spring Conference on Computer Graphics, pp. 210–218.
- Huber, Stefan (2012), Computing Straight Skeletons and Motorcycle Graphs: Theory and Practice, Shaker Verlag, ISBN 978-3-8440-0938-5.
- Yakersberg, Evgeny (2004), Morphing Between Geometric Shapes Using Straight-Skeleton-Based Interpolation., Israel Institute of Technology.
- Eppstein, David; Erickson, Jeff (1999), "Raising roofs, crashing cycles, and playing pool: applications of a data structure for finding pairwise interactions" (PDF), Discrete and Computational Geometry, 22 (4): 569–592, doi:10.1007/PL00009479, MR 1721026.
- Cheng, Siu-Wing; Vigneron, Antoine (2002), "Motorcycle graphs and straight skeletons" (PDF), Proceedings of the 13th Annual ACM-SIAM Symposium on Discrete Algorithms, pp. 156–165.
- Biedl, Therese; Held, Martin; Huber, Stefan; Kaaser, Dominik; Palfrader, Peter (February 2015). "A Simple Algorithm for Computing Positively Weighted Straight Skeletons of Monotone Polygons" (PDF). Information Processing Letters. 115 (2): 243–247. doi:10.1016/j.ipl.2014.09.021. As Biedl et al. point out, an earlier algorithm for monotone polygons by Das et al. is incorrect as described, and at best works only for inputs in general position that do not have vertex-vertex events: Das, Gautam K.; Mukhopadhyay, Asish; Nandy, Subhas C.; Patil, Sangameswar; Rao, S. V. (2010), "Computing the straight skeletons of a monotone polygon in O(n log n) time" (PDF), Proceedings of the 22nd Canadian Conference on Computational Geometry.
- Bélanger, David (2000), Designing Roofs of Buildings.
- Demaine, Erik D.; Demaine, Martin L.; Lubiw, Anna (1998), "Folding and cutting paper", Revised Papers from the Japan Conference on Discrete and Computational Geometry (JCDCG'98), Lecture Notes in Computer Science, 1763, Springer-Verlag, pp. 104–117, doi:10.1007/b75044.
- Barequet, Gill; Goodrich, Michael T.; Levi-Steiner, Aya; Steiner, Dvir (2003), "Straight-skeleton based contour interpolation", Proceedings of the Fourteenth Annual ACM-SIAM Symposium on Discrete Algorithms, pp. 119–127.
- Tănase, Mirela; Veltkamp, Remco C. (2003), "Polygon decomposition based on the straight line skeleton", Proceedings of the 19th Annual ACM Symposium on Computational Geometry, pp. 58–67, doi:10.1145/777792.777802.
- Bagheri, Alireza; Razzazi, Mohammadreza (2004), "Drawing free trees inside simple polygons using polygon skeleton", Computing and Informatics, 23 (3): 239–254, MR 2165282.
- Tomoeda, Akiyasu; Sugihara, Kokichi (2012), "Computational creation of a new illusionary solid sign", Ninth International Symposium on Voronoi Diagrams in Science and Engineering (ISVD 2012), pp. 144–147, doi:10.1109/ISVD.2012.26.
- Asente, Paul; Carr, Nathan (2013), "Creating contour gradients using 3D bevels", Proceedings of the Symposium on Computational Aesthetics (CAE '13, Anaheim, California), New York, NY, USA: ACM, pp. 63–66, doi:10.1145/2487276.2487283, ISBN 978-1-4503-2203-4.
- Haunert, Jan-Henrik; Sester, Monika (2008), "Area collapse and road centerlines based on straight skeletons", Geoinformatica, 12 (2): 169–191, doi:10.1007/s10707-007-0028-x.
- Raleigh, David Baring (2008), Straight Skeleton Survey Adjustment Of Road Centerlines From Gps Coarse Acquisition Data: A Case Study In Bolivia, Ohio State University, Geodetic Science and Surveying.
- Aichholzer, Oswin; Cheng, Howard; Devadoss, Satyan L.; Hackl, Thomas; Huber, Stefan; Li, Brian; Risteski, Andrej (2012), "What makes a tree a straight skeleton?" (PDF), Proceedings of the 24th Canadian Conference on Computational Geometry (CCCG'12).
- Barequet, Gill; Eppstein, David; Goodrich, Michael T.; Vaxman, Amir (2008), "Straight skeletons of three-dimensional polyhedra", Proc. 16th European Symposium on Algorithms, Lecture Notes in Computer Science, 5193, Springer-Verlag, pp. 148–160, arXiv:0805.0022, doi:10.1007/978-3-540-87744-8_13.
- Huber, Stefan; Aichholzer, Oswin; Hackl, Thomas; Vogtenhuber, Birgit (2014), "Straight skeletons by means of Voronoi diagrams under polyhedral distance functions" (PDF), Proc. 26th Canadian Conference on Computational Geometry (CCCG'14).
External links
- Erickson, Jeff. "Straight Skeleton of a Simple Polygon".
- 2D Straight Skeleton in CGAL, the Computational Geometry Algorithms Library
- Straight Skeleton for polygon with holes Straight Skeleton builder implemented in java.
- Amit Parnerkar, Sarnath Ramnath. "Engineering an efficient algorithm for finding the straight skeleton of a simple polygon in O(n log n)".