Neurotrophic electrode
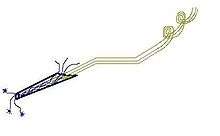
The neurotrophic electrode is an intracortical device designed to read the electrical signals that the brain uses to process information. It consists of a small, hollow glass cone attached to several electrically conductive gold wires. The term neurotrophic means "relating to the nutrition and maintenance of nerve tissue" and the device gets its name from the fact that it is coated with Matrigel and nerve growth factor to encourage the expansion of neurites through its tip.[1] It was invented by neurologist Dr. Philip Kennedy and was successfully implanted for the first time in a human patient in 1996 by neurosurgeon Roy Bakay.[2]
Background
Motivation for development
Victims of locked-in syndrome are cognitively intact and aware of their surroundings, but cannot move or communicate due to near complete paralysis of voluntary muscles. In early attempts to return some degree of control to these patients, researchers used cortical signals obtained with electroencephalography (EEG) to drive a mouse cursor. However, EEG lacks the speed and precision that can be obtained by using a direct cortical interface.[3]
Patients with other motor diseases, such as amyotrophic lateral sclerosis and cerebral palsy, as well as those who have suffered a severe stroke or spinal cord injury, also can benefit from implanted electrodes. Cortical signals can be used to control robotic limbs, so as the technology improves and the risks of the procedure are reduced, direct interfacing may even provide assistance for amputees.[4]
Design development
When Dr. Kennedy was designing the electrode, he knew he needed a device that would be wireless, biologically compatible, and capable of chronic implantation. Initial studies with Rhesus monkeys and rats demonstrated that the neurotrophic electrode was capable of chronic implantation for as long as 14 months (human trials would later establish even greater robustness).[5] This longevity was invaluable for the studies because while the monkeys were being trained at a task, neurons that were initially silent began firing as the task was learned, a phenomenon that would not have been observable if the electrode was not capable of long term implantation.[1]
Components
Glass cone
The glass cone is only 1–2 mm long, and is filled with trophic factors in order to encourage axons and dendrites to grow through its tip and hollow body. When the neurites reach the back end of the cone, they rejoin with the neuropil on that side, which anchors the glass cone in place. As a result, stable and robust long-term recording is attainable.[6] The cone sits with its tip near layer five of the cortex, among corticospinal tract cell bodies, and is inserted at an angle of 45° from the surface, about 5 or 6 mm deep.[7]
Gold wires
Three or four gold wires are glued to the inside of the glass cone and protrude out the back. They record the electrical activity of the axons that have grown through the cone, and are insulated with Teflon. The wires are coiled so as to relieve strain because they are embedded in the cortex on one end and attached to the amplifiers, which are fixed to the inside of the skull, on the other. Two wires are plugged into each amplifier to provide differential signalling.[7]
Wireless transmitter
One of the greatest strengths of the neurotrophic electrode is its wireless capability, because without transdermal wiring, the risk of infection is significantly reduced. As neural signals are collected by the electrodes, they travel up the gold wires and through the cranium, where they are passed on to the bioamplifiers (usually implemented by differential amplifiers). The amplified signals are sent through a switch to a transmitter, where they are converted to FM signals and broadcast with an antenna. The amplifiers and the transmitters are powered by a 1 MHz induction signal that is rectified and filtered. The antenna, amplifiers, analog switches, and FM transmitters are all contained in a standard surface mount printed circuit board that sits just under the scalp. The whole ensemble is coated in protective gels, Parylene, Elvax, and Silastic, to make it biocompatible and to protect the electronics from fluids.[7]
Data acquisition system
On the outside of the patient's scalp rests the corresponding induction coil and an antenna that sends the FM signal to the receiver. These devices are temporarily held in place with a water-soluble paste. The receiver demodulates the signal and sends it to the computer for spike sorting and data recording.[7]
Assembly
Most of the neurotrophic electrode is made by hand. The gold wires are cut to the correct length, coiled, and then bent to an angle of 45° just above the point of contact with the cone in order to limit the implantation depth. One more bend in the opposite direction is added where the wires pass through the skull. The tips are stripped of their Teflon coating, and the ones farthest from the cone are soldered and then sealed with dental acrylic to a component connector. The glass cone is made by heating and pulling a glass rod to a point and then cutting the tip at the desired length. The other end is not a straight cut, but rather is carved at an angle to provide a shelf onto which the gold wires can be attached. The wires are then placed on the shelf and a methyl methacrylate gel glue is applied in several coats, with care taken to avoid covering the conductive tips. Lastly, the device is sterilized using glutaraldehyde gas at a low temperature, and aerated.[7]
Implementation
Computer cursor control
One of Dr. Kennedy's patients, Johnny Ray, was able to learn how to control a computer cursor with the neurotrophic electrode. Three distinct neural signals from the device were correlated with cursor movement along the x-axis, along the y-axis, and a "select" function, respectively. Movement in a given direction was triggered by an increase in neuron firing rate on the associated channel.[3]
Speech synthesis
Neural signals elicited from another of Dr. Kennedy's patients have been used to formulate vowel sounds using a speech synthesizer in real time. The electronics setup was very similar to that used for the cursor, with the addition of a post-receiver neural decoder and the synthesizer itself. Researchers implanted the electrode in the area of the motor cortex associated with the movement of speech articulators because a pre-surgery fMRI scan indicated high activity there during a picture naming task. The average delay from neural firing to synthesizer output was 50 ms, which is approximately the same as the delay for an intact biological pathway.[8]
Comparison to other recording methods
The neurotrophic electrode, as described above, is a wireless device, and transmits its signals transcutaneously. In addition, it has demonstrated longevity of over four years in a human patient, because every component is completely biocompatible. It is limited in the amount of information it can provide, however, because the electronics it uses to transmit its signal require so much space on the scalp that only four can fit on a human skull.[2]
Alternatively, the Utah array is currently a wired device, but transmits more information. It has been implanted in a human for over two years and consists of 100 conductive silicon needle-like electrodes, so it has high resolution and can record from many individual neurons.[9]
In one experiment, Dr. Kennedy adapted the neurotrophic electrode to read local field potentials (LFPs). He demonstrated that they are capable of controlling assistive technology devices, suggesting that less invasive techniques can be used to restore functionality to locked-in patients. However, the study did not address the degree of control possible with LFPs or make a formal comparison between LFPs and single unit activity.[10]
Electroencephalography (EEG) involves the placement of many surface electrodes on the patient's scalp, in an attempt to record the summed activity of tens of thousands to millions of neurons. EEG has the potential for long term use as a brain-computer interface, because the electrodes can be kept on the scalp indefinitely. The temporal and spatial resolutions and signal to noise ratios of EEG have always lagged behind those of comparable intracortical devices, but it has the advantage of not requiring surgery.[9]
Electrocorticography (ECoG) records the cumulative activity of hundreds to thousands of neurons with a sheet of electrodes placed directly on the surface of the brain. In addition to requiring surgery and having low resolution, the ECoG device is wired, meaning the scalp cannot be completely closed, increasing the risk of infection. However, researchers investigating ECoG claim that the grid "possesses characteristics suitable for long term implantation".[9]
Drawbacks
Activation delay
The neurotrophic electrode is not active immediately after implantation because the axons must grow into the cone before the device can pick up electrical signals. Studies have shown that tissue growth is largely complete as early as one month after the procedure, but takes as many as four months to stabilize.[1]
Surgery risks
The risks involved with the implantation are those that are usually associated with brain surgery, namely, the possibility of bleeding, infection, seizures, stroke, and brain damage. Until the technology advances to the point that these risks are considerably reduced, the procedure will be reserved for extreme or experimental cases.[2]
Device failure
When Johnny Ray was implanted in 1998, one of the neurotrophic electrodes started providing an intermittent signal after it had become anchored in the neuropil, and as a result, Dr. Kennedy was forced to rely on the remaining devices.[3] Therefore, even if there is no complication from surgery, there is still a possibility that the electronics will fail. In addition, while the implants themselves are encased in the skull and are therefore relatively safe from physical damage, the electronics on the outside of the skull are vulnerable. Two of Dr. Kennedy's patients accidentally caused damage during spasms, but in both cases only the external devices needed to be replaced.[7]
Future applications
Neuroprosthetics
As of November 2010, Dr. Kennedy is working on the speech synthesis application of the electrode, but has plans to expand its uses to many different areas, one of which is restoring movement with neuroprosthetics.[2]
Silent speech
Silent speech is "speech processing in the absence of an intelligible acoustic signal" to be used either as an aid for the speech-handicapped or to communicate in areas with required silence or high background noise. One of the proposed future uses of the neurotrophic electrode, and brain computer interfaces in general, is to enable silent speech by decoding the "speaker's" neural signals and transmitting the audio output to headphones worn by the intended listener. The standard advantages and disadvantages of invasive versus non-invasive interfaces still apply.[11] However, for this particular application, the neurotrophic electrode has an advantage in that it has already been shown to be effective for restoring communication to disabled patients.[8]
References
- Kennedy, P. R., & Bakay, R. A. E. (1997). Activity of single action potentials in monkey motor cortex during long-term task learning. Brain Research, 760(1-2), 251-254.
- Interview with Dr. Kennedy, Senior Research Scientist, Neural Signals, Inc., 9/30/2010
- Kennedy, P. R., Bakay, R. A. E., Moore, M. M., Adams, K., & Goldwaithe, J. (2000). Direct control of a computer from the human central nervous system. [Article]. IEEE Transactions on Rehabilitation Engineering, 8(2), 198-202.
- Lebedev, M. A., & Nicolelis, M. A. L. (2006). Brain-machine interfaces: past, present and future. [Review]. Trends in Neurosciences, 29(9), 536-546.
- Kennedy, P. R., Mirra, S. S., & Bakay, R. A. E. (1992). THE CONE ELECTRODE - ULTRASTRUCTURAL STUDIES FOLLOWING LONG-TERM RECORDING IN RAT AND MONKEY CORTEX. [Article]. Neuroscience Letters, 142(1), 89-94.
- Kennedy, P. R. (1989). THE CONE ELECTRODE - A LONG-TERM ELECTRODE THAT RECORDS FROM NEURITES GROWN ONTO ITS RECORDING SURFACE. [Article]. Journal of Neuroscience Methods, 29(3), 181-193.
- Bartels, J., Andreasen, D., Ehirim, P., Mao, H., Seibert, S., Wright, E. J., et al. (2008). Neurotrophic electrode: Method of assembly and implantation into human motor speech cortex. [Article]. Journal of Neuroscience Methods, 174(2), 168-176.
- Guenther, F. H., Brumberg, J. S., Wright, E. J., Nieto-Castanon, A., Tourville, J. A., Panko, M., et al. (2009). A Wireless Brain-Machine Interface for Real-Time Speech Synthesis. PLoS ONE, 4(12).
- Brumberg, J. S., Nieto-Castanon, A., Kennedy, P. R., & Guenther, F. H. (2010). Brain-computer interfaces for speech communication. Speech Communication, 52(4), 367-379.
- Kennedy, P. R., Kirby, M. T., Moore, M. M., King, B., & Mallory, A. (2004). Computer control using human intracortical local field potentials. [Article]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 12(3), 339-344.
- Denby, B., Schultz, T., Honda, K., Hueber, T., Gilbert, J. M., & Brumberg, J. S. (2010). Silent speech interfaces. [Article]. Speech Communication, 52(4), 270-287.