3D rotation group
In mechanics and geometry, the 3D rotation group, often denoted SO(3), is the group of all rotations about the origin of three-dimensional Euclidean space under the operation of composition.[1] By definition, a rotation about the origin is a transformation that preserves the origin, Euclidean distance (so it is an isometry), and orientation (i.e. handedness of space). Every non-trivial rotation is determined by its axis of rotation (a line through the origin) and its angle of rotation. Composing two rotations results in another rotation; every rotation has a unique inverse rotation; and the identity map satisfies the definition of a rotation. Owing to the above properties (along composite rotations' associative property), the set of all rotations is a group under composition. Rotations are not commutative (for example, rotating R 90° in the x-y plane followed by S 90° in the y-z plane is not the same as S followed by R), making it a nonabelian group. Moreover, the rotation group has a natural structure as a manifold for which the group operations are smoothly differentiable; so it is in fact a Lie group. It is compact and has dimension 3.

Rotations are linear transformations of and can therefore be represented by matrices once a basis of has been chosen. Specifically, if we choose an orthonormal basis of , every rotation is described by an orthogonal 3×3 matrix (i.e. a 3×3 matrix with real entries which, when multiplied by its transpose, results in the identity matrix) with determinant 1. The group SO(3) can therefore be identified with the group of these matrices under matrix multiplication. These matrices are known as "special orthogonal matrices", explaining the notation SO(3).
The group SO(3) is used to describe the possible rotational symmetries of an object, as well as the possible orientations of an object in space. Its representations are important in physics, where they give rise to the elementary particles of integer spin.
Length and angle
Besides just preserving length, rotations also preserve the angles between vectors. This follows from the fact that the standard dot product between two vectors u and v can be written purely in terms of length:

It follows that any length-preserving transformation in preserves the dot product, and thus the angle between vectors. Rotations are often defined as linear transformations that preserve the inner product on , which is equivalent to requiring them to preserve length. See classical group for a treatment of this more general approach, where SO(3) appears as a special case.
Orthogonal and rotation matrices
Every rotation maps an orthonormal basis of to another orthonormal basis. Like any linear transformation of finite-dimensional vector spaces, a rotation can always be represented by a matrix. Let R be a given rotation. With respect to the standard basis e1,e2,e3 of the columns of R are given by (Re1, Re2, Re3). Since the standard basis is orthonormal, and since R preserves angles and length, the columns of R form another orthonormal basis. This orthonormality condition can be expressed in the form

where RT denotes the transpose of R and I is the 3 × 3 identity matrix. Matrices for which this property holds are called orthogonal matrices. The group of all 3 × 3 orthogonal matrices is denoted O(3), and consists of all proper and improper rotations.
In addition to preserving length, proper rotations must also preserve orientation. A matrix will preserve or reverse orientation according to whether the determinant of the matrix is positive or negative. For an orthogonal matrix R, note that det RT = det R implies (det R)2 = 1, so that det R = ±1. The subgroup of orthogonal matrices with determinant +1 is called the special orthogonal group, denoted SO(3).
Thus every rotation can be represented uniquely by an orthogonal matrix with unit determinant. Moreover, since composition of rotations corresponds to matrix multiplication, the rotation group is isomorphic to the special orthogonal group SO(3).
Improper rotations correspond to orthogonal matrices with determinant −1, and they do not form a group because the product of two improper rotations is a proper rotation.
Group structure
The rotation group is a group under function composition (or equivalently the product of linear transformations). It is a subgroup of the general linear group consisting of all invertible linear transformations of the real 3-space .[2]
Furthermore, the rotation group is nonabelian. That is, the order in which rotations are composed makes a difference. For example, a quarter turn around the positive x-axis followed by a quarter turn around the positive y-axis is a different rotation than the one obtained by first rotating around y and then x.
The orthogonal group, consisting of all proper and improper rotations, is generated by reflections. Every proper rotation is the composition of two reflections, a special case of the Cartan–Dieudonné theorem.
Axis of rotation
Every nontrivial proper rotation in 3 dimensions fixes a unique 1-dimensional linear subspace of which is called the axis of rotation (this is Euler's rotation theorem). Each such rotation acts as an ordinary 2-dimensional rotation in the plane orthogonal to this axis. Since every 2-dimensional rotation can be represented by an angle φ, an arbitrary 3-dimensional rotation can be specified by an axis of rotation together with an angle of rotation about this axis. (Technically, one needs to specify an orientation for the axis and whether the rotation is taken to be clockwise or counterclockwise with respect to this orientation).
For example, counterclockwise rotation about the positive z-axis by angle φ is given by

Given a unit vector n in and an angle φ, let R(φ, n) represent a counterclockwise rotation about the axis through n (with orientation determined by n). Then
- R(0,n) is the identity transformation for any n
- R(φ,n) = R(−φ,−n)
- R(π + φ,n) = R(π − φ,−n).
Using these properties one can show that any rotation can be represented by a unique angle φ in the range 0 ≤ φ ≤ π and a unit vector n such that
- n is arbitrary if φ = 0
- n is unique if 0 < φ < π
- n is unique up to a sign if φ = π (that is, the rotations R(π, ±n) are identical).
In the next section, this representation of rotations is used to identify SO(3) topologically with three-dimensional real projective space.
Topology
The Lie group SO(3) is diffeomorphic to the real projective space [3]

Consider the solid ball in of radius π (that is, all points of of distance π or less from the origin). Given the above, for every point in this ball there is a rotation, with axis through the point and the origin, and rotation angle equal to the distance of the point from the origin. The identity rotation corresponds to the point at the center of the ball. Rotation through angles between 0 and −π correspond to the point on the same axis and distance from the origin but on the opposite side of the origin. The one remaining issue is that the two rotations through π and through −π are the same. So we identify (or "glue together") antipodal points on the surface of the ball. After this identification, we arrive at a topological space homeomorphic to the rotation group.
Indeed, the ball with antipodal surface points identified is a smooth manifold, and this manifold is diffeomorphic to the rotation group. It is also diffeomorphic to the real 3-dimensional projective space so the latter can also serve as a topological model for the rotation group.

These identifications illustrate that SO(3) is connected but not simply connected. As to the latter, in the ball with antipodal surface points identified, consider the path running from the "north pole" straight through the interior down to the south pole. This is a closed loop, since the north pole and the south pole are identified. This loop cannot be shrunk to a point, since no matter how you deform the loop, the start and end point have to remain antipodal, or else the loop will "break open". In terms of rotations, this loop represents a continuous sequence of rotations about the z-axis starting and ending at the identity rotation (i.e. a series of rotation through an angle φ where φ runs from 0 to 2π).
Surprisingly, if you run through the path twice, i.e., run from north pole down to south pole, jump back to the north pole (using the fact that north and south poles are identified), and then again run from north pole down to south pole, so that φ runs from 0 to 4π, you get a closed loop which can be shrunk to a single point: first move the paths continuously to the ball's surface, still connecting north pole to south pole twice. The second half of the path can then be mirrored over to the antipodal side without changing the path at all. Now we have an ordinary closed loop on the surface of the ball, connecting the north pole to itself along a great circle. This circle can be shrunk to the north pole without problems. The plate trick and similar tricks demonstrate this practically.
The same argument can be performed in general, and it shows that the fundamental group of SO(3) is cyclic group of order 2. In physics applications, the non-triviality of the fundamental group allows for the existence of objects known as spinors, and is an important tool in the development of the spin–statistics theorem.
The universal cover of SO(3) is a Lie group called Spin(3). The group Spin(3) is isomorphic to the special unitary group SU(2); it is also diffeomorphic to the unit 3-sphere S3 and can be understood as the group of versors (quaternions with absolute value 1). The connection between quaternions and rotations, commonly exploited in computer graphics, is explained in quaternions and spatial rotations. The map from S3 onto SO(3) that identifies antipodal points of S3 is a surjective homomorphism of Lie groups, with kernel {±1}. Topologically, this map is a two-to-one covering map. (See the plate trick.)
Connection between SO(3) and SU(2)
In this section, we give two different constructions of a two-to-one and surjective homomorphism of SU(2) onto SO(3).
Using quaternions of unit norm
The group SU(2) is isomorphic to the quaternions of unit norm via a map given by

Let us now identify with the span of . One can then verify that if is in and is a unit quaternion, then




Furthermore, the map is a rotation of Moreover, is the same as . This means that there is a 2:1 homomorphism from quaternions of unit norm to SO(3).




One can work this homomorphism out explicitly: the unit quaternion, q, with

is mapped to the rotation matrix

This is a rotation around the vector (x, y, z) by an angle 2θ, where cos θ = w and |sin θ| = ||(x, y, z)||. The proper sign for sin θ is implied, once the signs of the axis components are fixed. The 2:1-nature is apparent since both q and −q map to the same Q.
Using Möbius transformations
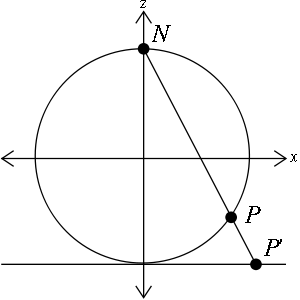
The general reference for this section is Gelfand, Minlos & Shapiro (1963). The points P on the sphere

can, barring the north pole N, be put into one-to-one bijection with points S(P) = P´ on the plane M defined by z = −1/2, see figure. The map S is called stereographic projection.
Let the coordinates on M be (ξ, η). The line L passing through N and P can be parametrized as

Demanding that the z-coordinate of equals −1/2, one finds


We have Hence the map


where, for later convenience, the plane M is identified with the complex plane

For the inverse, write L as

and demand x2 + y2 + z2 = 1/4 to find s = 1/1 + ξ2 + η2 and thus

If g ∈ SO(3) is a rotation, then it will take points on S to points on S by its standard action Πs(g) on the embedding space By composing this action with S one obtains a transformation S ∘ Πs(g) ∘ S−1 of M,

Thus Πu(g) is a transformation of associated to the transformation Πs(g) of .

It turns out that g ∈ SO(3) represented in this way by Πu(g) can be expressed as a matrix Πu(g) ∈ SU(2) (where the notation is recycled to use the same name for the matrix as for the transformation of it represents). To identify this matrix, consider first a rotation gφ about the z-axis through an angle φ,

Hence

which, unsurprisingly, is a rotation in the complex plane. In an analogous way, if gθ is a rotation about the x-axis through and angle θ, then

which, after a little algebra, becomes

These two rotations, thus correspond to bilinear transforms of ℝ2 ≃ ℂ ≃ M, namely, they are examples of Möbius transformations.

A general Möbius transformation is given by

The rotations, generate all of SO(3) and the composition rules of the Möbius transformations show that any composition of translates to the corresponding composition of Möbius transformations. The Möbius transformations can be represented by matrices


since a common factor of α, β, γ, δ cancels.
For the same reason, the matrix is not uniquely defined since multiplication by −I has no effect on either the determinant or the Möbius transformation. The composition law of Möbius transformations follow that of the corresponding matrices. The conclusion is that each Möbius transformation corresponds to two matrices g, −g ∈ SL(2, ℂ).
Using this correspondence one may write

These matrices are unitary and thus Πu(SO(3)) ⊂ SU(2) ⊂ SL(2, ℂ). In terms of Euler angles[nb 1] one finds for a general rotation
-
(1)

one has[5]
-
(2)

For the converse, consider a general matrix

Make the substitutions

With the substitutions, Π(gα, β) assumes the form of the right hand side (RHS) of (2), which corresponds under Πu to a matrix on the form of the RHS of (1) with the same φ, θ, ψ. In terms of the complex parameters α, β,

To verify this, substitute for α. β the elements of the matrix on the RHS of (2). After some manipulation, the matrix assumes the form of the RHS of (1).
It is clear from the explicit form in terms of Euler angles that the map

just described is a smooth, 2:1 and surjective group homomorphism. It is hence an explicit description of the universal covering map of SO(3) from the universal covering group SU(2).
Lie algebra
Associated with every Lie group is its Lie algebra, a linear space of the same dimension as the Lie group, closed under a bilinear alternating product called the Lie bracket. The Lie algebra of SO(3) is denoted by and consists of all skew-symmetric 3 × 3 matrices.[6] This may be seen by differentiating the orthogonality condition, ATA = I, A ∈ SO(3).[nb 2] The Lie bracket of two elements of is, as for the Lie algebra of every matrix group, given by the matrix commutator, [A1, A2] = A1A2 − A2A1, which is again a skew-symmetric matrix. The Lie algebra bracket captures the essence of the Lie group product in a sense made precise by the Baker–Campbell–Hausdorff formula.

The elements of are the "infinitesimal generators" of rotations, i.e. they are the elements of the tangent space of the manifold SO(3) at the identity element. If denotes a counterclockwise rotation with angle φ about the axis specified by the unit vector then



This can be used to show that the Lie algebra (with commutator) is isomorphic to the Lie algebra (with cross product). Under this isomorphism, an Euler vector corresponds to the linear map defined by



In more detail, a most often suitable basis for as a 3-dimensional vector space is

The commutation relations of these basis elements are,

which agree with the relations of the three standard unit vectors of under the cross product.
As announced above, one can identify any matrix in this Lie algebra with an Euler vector [7]


This identification is sometimes called the hat-map.[8] Under this identification, the bracket corresponds in to the cross product,

The matrix identified with a vector has the property that


where the left-hand side we have ordinary matrix multiplication. This implies is in the null space of the skew-symmetric matrix with which it is identified, because

A note on Lie algebra
In Lie algebra representations, the group SO(3) is compact and simple of rank 1, and so it has a single independent Casimir element, a quadratic invariant function of the three generators which commutes with all of them. The Killing form for the rotation group is just the Kronecker delta, and so this Casimir invariant is simply the sum of the squares of the generators, of the algebra


That is, the Casimir invariant is given by

For unitary irreducible representations Dj, the eigenvalues of this invariant are real and discrete, and characterize each representation, which is finite dimensional, of dimensionality . That is, the eigenvalues of this Casimir operator are


where is integer or half-integer, and referred to as the spin or angular momentum.

So, above, the 3 × 3 generators, L, displayed act on the triplet (spin 1) representation, while the 2 × 2 ones, t, act on the doublet (spin-½) representation. By taking Kronecker products of D1/2 with itself repeatedly, one may construct all higher irreducible representations Dj. That is, the resulting generators for higher spin systems in three spatial dimensions, for arbitrarily large j, can be calculated using these spin operators and ladder operators.
For every unitary irreducible representations Dj there is an equivalent one, D−j−1. All infinite-dimensional irreducible representations must be non-unitary, since the group is compact.
In quantum mechanics, the Casimir invariant is the "angular-momentum-squared" operator; integer values of spin j characterize bosonic representations, while half-integer values fermionic representations. The antihermitian matrices used above are utilized as spin operators, after they are multiplied by i, so they are now hermitian (like the Pauli matrices). Thus, in this language,

and hence

Explicit expressions for these Dj are,

where is arbitrary and

For example, the resulting spin matrices for spin 1 () are:


Note, however, how these are in an equivalent, but different basis, the spherical basis, than the above in the Cartesian basis.[nb 3]

For spin 3/2 ():


For spin 5/2 ():


Isomorphism with 𝖘𝖚(2)
The Lie algebras and are isomorphic. One basis for is given by[9]


These are related to the Pauli matrices by

The Pauli matrices abide by the physicists' convention for Lie algebras. In that convention, Lie algebra elements are multiplied by i, the exponential map (below) is defined with an extra factor of i in the exponent and the structure constants remain the same, but the definition of them acquires a factor of i. Likewise, commutation relations acquire a factor of i. The commutation relations for the are


where εijk is the totally anti-symmetric symbol with ε123 = 1. The isomorphism between and can be set up in several ways. For later convenience, and are identified by mapping

and extending by linearity.
Exponential map
The exponential map for SO(3), is, since SO(3) is a matrix Lie group, defined using the standard matrix exponential series,

For any skew-symmetric matrix A ∈ 𝖘𝖔(3), eA is always in SO(3). The proof uses the elementary properties of the matrix exponential

since the matrices A and AT commute, this can be easily proven with the skew-symmetric matrix condition. This is not enough to show that 𝖘𝖔(3) is the corresponding Lie algebra for SO(3), and shall be proven separately.
The level of difficulty of proof depends on how a matrix group Lie algebra is defined. Hall (2003) defines the Lie algebra as the set of matrices

in which case it is trivial. Rossmann (2002) uses for a definition derivatives of smooth curve segments in SO(3) through the identity taken at the identity, in which case it is harder.[10]
For a fixed A ≠ 0, etA, −∞ < t < ∞ is a one-parameter subgroup along a geodesic in SO(3). That this gives a one-parameter subgroup follows directly from properties of the exponential map.[11]
The exponential map provides a diffeomorphism between a neighborhood of the origin in the 𝖘𝖔(3) and a neighborhood of the identity in the SO(3).[12] For a proof, see Closed subgroup theorem.
The exponential map is surjective. This follows from the fact that every R ∈ SO(3), since every rotation leaves an axis fixed (Euler's rotation theorem), and is conjugate to a block diagonal matrix of the form

such that A = BDB−1, and that

together with the fact that 𝖘𝖔(3) is closed under the adjoint action of SO(3), meaning that BθLzB−1 ∈ 𝖘𝖔(3).
Thus, e.g., it is easy to check the popular identity

As shown above, every element A ∈ 𝖘𝖔(3) is associated with a vector ω = θ u, where u = (x,y,z) is a unit magnitude vector. Since u is in the null space of A, if one now rotates to a new basis, through some other orthogonal matrix O, with u as the z axis, the final column and row of the rotation matrix in the new basis will be zero.
Thus, we know in advance from the formula for the exponential that exp(OAOT) must leave u fixed. It is mathematically impossible to supply a straightforward formula for such a basis as a function of u, because its existence would violate the hairy ball theorem; but direct exponentiation is possible, and yields

where and . This is recognized as a matrix for a rotation around axis u by the angle θ: cf. Rodrigues' rotation formula.


Logarithm map
Given R ∈ SO(3), let denote the antisymmetric part and let Then, the logarithm of A is given by[8]



This is manifest by inspection of the mixed symmetry form of Rodrigues' formula,

where the first and last term on the right-hand side are symmetric.
Baker–Campbell–Hausdorff formula
Suppose X and Y in the Lie algebra are given. Their exponentials, exp(X) and exp(Y), are rotation matrices, which can be multiplied. Since the exponential map is a surjection, for some Z in the Lie algebra, exp(Z) = exp(X) exp(Y), and one may tentatively write

for C some expression in X and Y. When exp(X) and exp(Y) commute, then Z = X + Y, mimicking the behavior of complex exponentiation.
The general case is given by the more elaborate BCH formula, a series expansion of nested Lie brackets.[13] For matrices, the Lie bracket is the same operation as the commutator, which monitors lack of commutativity in multiplication. This general expansion unfolds as follows,[nb 4]

The infinite expansion in the BCH formula for SO(3) reduces to a compact form,

for suitable trigonometric function coefficients (α, β, γ).
The (α, β, γ) are given by

where

for

The inner product is the Hilbert–Schmidt inner product and the norm is the associated norm. Under the hat-isomorphism,

It is worthwhile to write this composite rotation generator as

to emphasize that this is a Lie algebra identity.
The above identity holds for all faithful representations of 𝖘𝖔(3). The kernel of a Lie algebra homomorphism is an ideal, but 𝖘𝖔(3), being simple, has no nontrivial ideals and all nontrivial representations are hence faithful. It holds in particular in the doublet or spinor representation. The same explicit formula thus follows in a simpler way through Pauli matrices, cf. the 2×2 derivation for SU(2).
The Pauli vector version of the same BCH formula is the somewhat simpler group composition law of SU(2),

where

the spherical law of cosines. (Note a', b' ,c' are angles, not the a,b,c above.)
This is manifestly of the same format as above,

with

so that

For uniform normalization of the generators in the Lie algebra involved, express the Pauli matrices in terms of t-matrices, σ →2i t, so that

To verify then these are the same coefficients as above, compute the ratios of the coefficients,

Finally, γ = γ' given the identity d = sin 2c'.
For the general n × n case, one might use Ref.[14]
The quaternion formulation of the composition of two rotations RB and RA also yields directly the rotation axis and angle of the composite rotation RC=RBRA.
Let the quaternion associated with a spatial rotation R is constructed from its rotation axis S and the rotation angle φ this axis. The associated quaternion is given by,

Then the composition of the rotation RR with RA is the rotation RC=RBRA with rotation axis and angle defined by the product of the quaternions

that is

Expand this product to obtain

Divide both sides of this equation by the identity, which is the law of cosines on a sphere,

and compute

This is Rodrigues' formula for the axis of a composite rotation defined in terms of the axes of the two rotations. He derived this formula in 1840 (see page 408).[15]
The three rotation axes A, B, and C form a spherical triangle and the dihedral angles between the planes formed by the sides of this triangle are defined by the rotation angles.
Infinitesimal rotations
The matrices in the Lie algebra are not themselves rotations; the skew-symmetric matrices are derivatives. An actual "differential rotation", or infinitesimal rotation matrix has the form

where dθ is vanishingly small and A ∈ 𝖘𝖔(3).
These matrices do not satisfy all the same properties as ordinary finite rotation matrices under the usual treatment of infinitesimals .[16] To understand what this means, consider

First, test the orthogonality condition, QTQ = I. The product is

differing from an identity matrix by second order infinitesimals, discarded here. So, to first order, an infinitesimal rotation matrix is an orthogonal matrix.
Next, examine the square of the matrix,

Again discarding second order effects, note that the angle simply doubles. This hints at the most essential difference in behavior, which we can exhibit with the assistance of a second infinitesimal rotation,

Compare the products dAx dAy to dAydAx,

Since is second-order, we discard it: thus, to first order, multiplication of infinitesimal rotation matrices is commutative. In fact,


again to first order. In other words, the order in which infinitesimal rotations are applied is irrelevant.
This useful fact makes, for example, derivation of rigid body rotation relatively simple. But one must always be careful to distinguish (the first order treatment of) these infinitesimal rotation matrices from both finite rotation matrices and from Lie algebra elements. When contrasting the behavior of finite rotation matrices in the BCH formula above with that of infinitesimal rotation matrices, where all the commutator terms will be second order infinitesimals one finds a bona fide vector space. Technically, this dismissal of any second order terms amounts to Group contraction.
Realizations of rotations
We have seen that there are a variety of ways to represent rotations:
- as orthogonal matrices with determinant 1,
- by axis and rotation angle
- in quaternion algebra with versors and the map 3-sphere S3 → SO(3) (see quaternions and spatial rotations)
- in geometric algebra as a rotor
- as a sequence of three rotations about three fixed axes; see Euler angles.
Spherical harmonics
See also Representations of SO(3)
The group SO(3) of three-dimensional Euclidean rotations has an infinite-dimensional representation on the Hilbert space

where are spherical harmonics. Its elements are square integrable complex-valued functions[nb 5] on the sphere. The inner product on this space is given by

-
(H1)

If f is an arbitrary square integrable function defined on the unit sphere S2, then it can be expressed as[17]
-
(H2)

where the expansion coefficients are given by
-
(H3)

The Lorentz group action restricts to that of SO(3) and is expressed as
-
(H4)

This action is unitary, meaning that
-
(H5)

The D(ℓ) can be obtained from the D(m, n) of above using Clebsch–Gordan decomposition, but they are more easily directly expressed as an exponential of an odd-dimensional su(2)-representation (the 3-dimensional one is exactly 𝖘𝖔(3)).[18][19] In this case the space L2(S2) decomposes neatly into an infinite direct sum of irreducible odd finite-dimensional representations V2i + 1, i = 0, 1, … according to[20]
-
(H6)

This is characteristic of infinite-dimensional unitary representations of SO(3). If Π is an infinite-dimensional unitary representation on a separable[nb 6] Hilbert space, then it decomposes as a direct sum of finite-dimensional unitary representations.[17] Such a representation is thus never irreducible. All irreducible finite-dimensional representations (Π, V) can be made unitary by an appropriate choice of inner product,[17]

where the integral is the unique invariant integral over SO(3) normalized to 1, here expressed using the Euler angles parametrization. The inner product inside the integral is any inner product on V.
Generalizations
The rotation group generalizes quite naturally to n-dimensional Euclidean space, with its standard Euclidean structure. The group of all proper and improper rotations in n dimensions is called the orthogonal group O(n), and the subgroup of proper rotations is called the special orthogonal group SO(n), which is a Lie group of dimension n(n − 1)/2.

In special relativity, one works in a 4-dimensional vector space, known as Minkowski space rather than 3-dimensional Euclidean space. Unlike Euclidean space, Minkowski space has an inner product with an indefinite signature. However, one can still define generalized rotations which preserve this inner product. Such generalized rotations are known as Lorentz transformations and the group of all such transformations is called the Lorentz group.
The rotation group SO(3) can be described as a subgroup of E+(3), the Euclidean group of direct isometries of Euclidean This larger group is the group of all motions of a rigid body: each of these is a combination of a rotation about an arbitrary axis and a translation along the axis, or put differently, a combination of an element of SO(3) and an arbitrary translation.
In general, the rotation group of an object is the symmetry group within the group of direct isometries; in other words, the intersection of the full symmetry group and the group of direct isometries. For chiral objects it is the same as the full symmetry group.
See also
- Orthogonal group
- Angular momentum
- Coordinate rotations
- Charts on SO(3)
- Representations of SO(3)
- Euler angles
- Rodrigues' rotation formula
- Infinitesimal rotation
- Pin group
- Quaternions and spatial rotations
- Rigid body
- Spherical harmonics
- Plane of rotation
- Lie group
- Pauli matrix
- Plate trick
- Three-dimensional rotation operator
Footnotes
- This is effected by first applying a rotation through φ about the z-axis to take the x-axis to the line L, the intersection between the planes xy and x´y´, the latter being the rotated xy-plane. Then rotate with through θ about L to obtain the new z-axis from the old one, and finally rotate by through an angle ψ about the new z-axis, where ψ is the angle between L and the new x-axis. In the equation, and are expressed in a temporary rotated basis at each step, which is seen from their simple form. To transform these back to the original basis, observe that Here boldface means that the rotation is expressed in the original basis. Likewise,
- For an alternative derivation of , see Classical group.
- Specifically, for
- For a full proof, see Derivative of the exponential map. Issues of convergence of this series to the correct element of the Lie algebra are here swept under the carpet. Convergence is guaranteed when and The series may still converge even if these conditions aren't fulfilled. A solution always exists since exp is onto in the cases under consideration.
- The elements of L2(S2) are actually equivalence classes of functions. two functions are declared equivalent if they differ merely on a set of measure zero. The integral is the Lebesgue integral in order to obtain a complete inner product space.
- A Hilbert space is separable if and only if it has a countable basis. All separable Hilbert spaces are isomorphic.









References
- Jacobson (2009), p. 34, Ex. 14.
- n × n real matrices are identical to linear transformations of expressed in its standard basis.
- Hall 2015 Proposition 1.17
- Rossmann 2002 p. 95.
- These expressions were, in fact, seminal in the development of quantum mechanics in the 1930s, cf. Ch III, § 16, B.L. van der Waerden, 1932/1932
- Hall 2015 Proposition 3.24
- Rossmann 2002
- Engø 2001
- Hall 2015 Example 3.27
- See Rossmann 2002, theorem 3, section 2.2.
- Rossmann 2002 Section 1.1.
- Hall 2003 Theorem 2.27.
- Hall 2003, Ch. 3; Varadarajan 1984, §2.15
- Curtright, Fairlie & Zachos 2014 Group elements of SU(2) are expressed in closed form as finite polynomials of the Lie algebra generators, for all definite spin representations of the rotation group.
- Rodrigues, O. (1840), Des lois géométriques qui régissent les déplacements d’un système solide dans l’espace, et la variation des coordonnées provenant de ses déplacements con- sidérés indépendamment des causes qui peuvent les produire, Journal de Mathématiques Pures et Appliquées de Liouville 5, 380–440.
- (Goldstein, Poole & Safko 2002, §4.8)
- Gelfand, Minlos & Shapiro 1963
- In Quantum Mechanics – non-relativistic theory by Landau and Lifshitz the lowest order D are calculated analytically.
- Curtright, Fairlie & Zachos 2014 A formula for D(ℓ) valid for all ℓ is given.
- Hall 2003 Section 4.3.5.
Bibliography
- Boas, Mary L. (2006), Mathematical Methods in the Physical Sciences (3rd ed.), John Wiley & sons, pp. 120, 127, 129, 155ff and 535, ISBN 978-0471198260
- Curtright, T. L.; Fairlie, D. B.; Zachos, C. K. (2014), "A compact formula for rotations as spin matrix polynomials", SIGMA, 10: 084, arXiv:1402.3541, Bibcode:2014SIGMA..10..084C, doi:10.3842/SIGMA.2014.084
- Engø, Kenth (2001), "On the BCH-formula in 𝖘𝖔(3)", BIT Numerical Mathematics, 41 (3): 629–632, doi:10.1023/A:1021979515229, ISSN 0006-3835
- Gelfand, I.M.; Minlos, R.A.; Shapiro, Z.Ya. (1963), Representations of the Rotation and Lorentz Groups and their Applications, New York: Pergamon Press
- Hall, Brian C. (2015), Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Graduate Texts in Mathematics, 222 (2nd ed.), Springer, ISBN 978-3319134666
- Jacobson, Nathan (2009), Basic algebra, 1 (2nd ed.), Dover Publications, ISBN 978-0-486-47189-1
- Joshi, A. W. (2007), Elements of Group Theory for Physicists, New Age International, pp. 111ff, ISBN 81-224-0975-X
- Rossmann, Wulf (2002), Lie Groups – An Introduction Through Linear Groups, Oxford Graduate Texts in Mathematics, Oxford Science Publications, ISBN 0 19 859683 9
- van der Waerden, B. L. (1952), Group Theory and Quantum Mechanics, Springer Publishing, ISBN 978-3642658624 (translation of the original 1932 edition, Die Gruppentheoretische Methode in Der Quantenmechanik).
- Veltman, M.; 't Hooft, G.; de Wit, B. (2007). "Lie Groups in Physics (online lecture)" (PDF). Retrieved 2016-10-24.CS1 maint: ref=harv (link).