Tennis racket theorem
The tennis racket theorem or intermediate axis theorem is a result in classical mechanics describing the movement of a rigid body with three distinct principal moments of inertia. It is also dubbed the Dzhanibekov effect, after Russian cosmonaut Vladimir Dzhanibekov who noticed one of the theorem's logical consequences while in space in 1985[1] although the effect was already known for at least 150 years before that.[2][3]
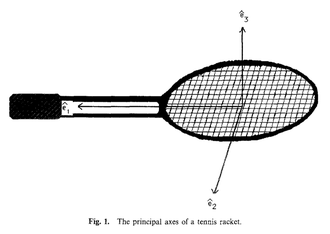
The theorem describes the following effect: rotation of an object around its first and third principal axes is stable, while rotation around its second principal axis (or intermediate axis) is not.
This can be demonstrated with the following experiment: hold a tennis racket at its handle, with its face being horizontal, and try to throw it in the air so that it will perform a full rotation around the horizontal axis perpendicular to the handle, and try to catch the handle. In almost all cases, during that rotation the face will also have completed a half rotation, so that the other face is now up. By contrast, it is easy to throw the racket so that it will rotate around the handle axis (the third principal axis) without accompanying half-rotation around another axis; it is also possible to make it rotate around the vertical axis perpendicular to the handle (the first principal axis) without any accompanying half-rotation.
The experiment can be performed with any object that has three different moments of inertia, for instance with a book, remote control or smartphone. The effect occurs whenever the axis of rotation differs only slightly from the object's second principal axis; air resistance or gravity are not necessary.[4]
Theory
The tennis racket theorem can be qualitatively analysed with the help of Euler's equations. Under torque–free conditions, they take the following form:

Here denote the object's principal moments of inertia, and we assume . The angular velocities around the object's three principal axes are and their time derivatives are denoted by .




Stable rotation around the first and third principal axis
Consider the situation when the object is rotating around axis with moment of inertia . To determine the nature of equilibrium, assume small initial angular velocities along the other two axes. As a result, according to equation (1), is very small. Therefore, the time dependence of may be neglected.



Now, differentiating equation (2) and substituting from equation (3),


because and .


Note that is being opposed and so rotation around this axis is stable for the object.

Similar reasoning gives that rotation around axis with moment of inertia is also stable.

Unstable rotation around the second principal axis
Now apply the same analysis to axis with moment of inertia This time is very small. Therefore, the time dependence of may be neglected.



Now, differentiating equation (1) and substituting from equation (3),

Note that is not opposed (and therefore will grow) and so rotation around the second axis is unstable. Therefore, even a small disturbance along other axes causes the object to 'flip'.

See also
References
- Эффект Джанибекова (гайка Джанибекова), 23 July 2009 (in Russian). The software can be downloaded from here
- Poinsot (1834) Theorie Nouvelle de la Rotation des Corps, Bachelier, Paris
- Derek Muller (September 19, 2019). The Bizarre Behavior of Rotating Bodies, Explained. Veritasium. Retrieved February 16, 2020.
- Levi, Mark (2014). Classical Mechanics with Calculus of Variations and Optimal Control: An Intuitive Introduction. American Mathematical Society. pp. 151–152. ISBN 9781470414443.
External links
- Dan Russell (5 March 2010). "Slow motion Dzhanibekov effect demonstration with table tennis rackets". Retrieved 2 February 2017 – via YouTube.
- zapadlovsky (16 June 2010). "Dzhanibekov effect demonstration". Retrieved 2 February 2017 – via YouTube. on Mir International Space Station
- Viacheslav Mezentsev (7 September 2011). "Djanibekov effect modeled in Mathcad 14". Retrieved 2 February 2017 – via YouTube.
- Louis Poinsot, Théorie nouvelle de la rotation des corps, Paris, Bachelier, 1834, 170 p. OCLC 457954839 : historically, the first mathematical description of this effect.
- "Ellipsoids and The Bizarre Behaviour of Rotating Bodies". - intuitive video explanation by Matt Parker