Sensitivity (control systems)
The controller parameters are typically matched to the process characteristics and since the process may change, it is important that the controller parameters are chosen in such a way that the closed loop system is not sensitive to variations in process dynamics. One way to characterize sensitivity is through the nominal sensitivity peak :[1]

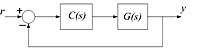

where and denote the plant and controller's transfer function in a basic closed loop control system using unity negative feedback.


The sensitivity function , which appears in the above formula also describes the transfer function from external disturbance to process output. In fact, assuming an additive disturbance n after the output

of the plant, the transfer functions of the closed loop system are given by

Hence, lower values of suggest further attenuation of the external disturbance. The sensitivity function tells us how the disturbances are influenced by feedback. Disturbances with frequencies such that is less than one are reduced by an amount equal to the distance to the critical point and disturbances with frequencies such that is larger than one are amplified by the feedback.[2]



It is important that the largest value of the sensitivity function be limited for a control system and it is common to require that the maximum value of the sensitivity function, , be in a range of 1.3 to 2.
Sensitivity circle
The quantity is the inverse of the shortest distance from the Nyquist curve of the loop transfer function to the critical point . A sensitivity guarantees that the distance from the critical point to the Nyquist curve is always greater than and the Nyquist curve of the loop transfer function is always outside a circle around the critical point with the radius , known as the sensitivity circle. defines the maximum value of the sensitivity function and the inverse of gives you the shortest distance from the open-loop transfer function to the critical point .[3][4]



References
- K.J. Astrom and T. Hagglund, PID Controllers: Theory, Design and Tuning, 2nd ed. Research Triangle Park, NC 27709, USA: ISA - The Instrumentation, Systems, and Automation Society, 1995.
- K.J. Astrom, "Model uncertainty and robust control," in Lecture Notes on Iterative Identification and Control Design. Lund, Sweden: Lund Institute of Technology, Jan. 2000, pp. 63–100.
- A. G. Yepes, et al., "Analysis and design of resonant current controllers for voltage-source converters by means of Nyquist diagrams and sensitivity function" in IEEE Trans. on Industrial Electronics, vol. 58, No. 11, Nov. 2011, pp. 5231–5250.
- Karl Johan Åström and Richard M. Murray. Feedback systems : an introduction for scientists and engineers. Princeton University Press, Princeton, NJ, 2008.