Scleronomous
A mechanical system is scleronomous if the equations of constraints do not contain the time as an explicit variable and the equation of constraints can be described by generalized coordinates. Such constraints are called scleronomic constraints. The opposite of scleronomous is rheonomous.
Application
In 3-D space, a particle with mass , velocity has kinetic energy




Velocity is the derivative of position with respect to time . Use chain rule for several variables:



where are generalized coordinates.

Therefore,

Rearranging the terms carefully,[1]




where , , are respectively homogeneous functions of degree 0, 1, and 2 in generalized velocities. If this system is scleronomous, then the position does not depend explicitly with time:




Therefore, only term does not vanish:

Kinetic energy is a homogeneous function of degree 2 in generalized velocities .
Example: pendulum
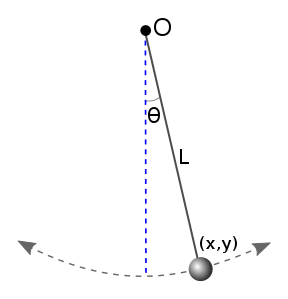
As shown at right, a simple pendulum is a system composed of a weight and a string. The string is attached at the top end to a pivot and at the bottom end to a weight. Being inextensible, the string’s length is a constant. Therefore, this system is scleronomous; it obeys scleronomic constraint

where is the position of the weight and is length of the string.


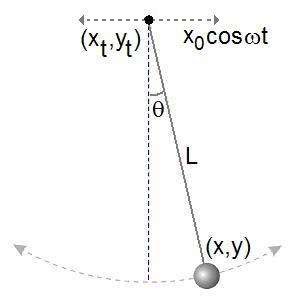
Take a more complicated example. Refer to the next figure at right, Assume the top end of the string is attached to a pivot point undergoing a simple harmonic motion

where is amplitude, is angular frequency, and is time.


Although the top end of the string is not fixed, the length of this inextensible string is still a constant. The distance between the top end and the weight must stay the same. Therefore, this system is rheonomous as it obeys constraint explicitly dependent on time

See also
- Lagrangian mechanics
- Holonomic system
- Nonholonomic system
- Rheonomous
- Mass matrix
References
- Goldstein, Herbert (1980). Classical Mechanics (3rd ed.). United States of America: Addison Wesley. p. 25. ISBN 0-201-65702-3.