Melnikov distance
In mathematics, the Melnikov method is a tool to identify the existence of chaos in a class of dynamical systems under periodic perturbation.
Introduction
The Melnikov method is used in many cases to predict the occurrence of chaotic orbits in non-autonomous smooth nonlinear systems under periodic perturbation. According to the method is possible to construct a function called "Melnikov function", and hence to predict either regular or chaotic behavior of a studied dynamical system. Thus, the Melnikov function will be used to determine a measure of distance between stable and unstable manifolds in the Poincaré map. Moreover, when this measure is equal to zero, by the method, those manifolds crossed each other transversally and from that crossing the system will become chaotic.
This method appeared in 1890 by H. Poincaré [1] and by V. Melnikov in 1963[2] and could be called the "Poincaré-Melnikov Method". Moreover, it was described by several textbooks as Guckenheimer & Holmes,[3] Kuznetsov,[4] S. Wiggins,[5] Awrejcewicz & Holicke[6] and others. There are many applications for Melnikov distance as it can be used to predict chaotic vibrations.[7] In this method, critical amplitude is found by setting the distance between homoclinic orbits and stable manifolds equal to zero. Just like in Guckenheimer & Holmes where they were the first who based on the KAM theorem, determined a set of parameters of relatively weak perturbed Hamiltonian systems of two-degrees-of-freedom, at which homoclinic bifurcation occurred.
The Melnikov distance
Consider the following class of systems given by



or in vector form





where , , and




Assume that system (1) is smooth on the region of interest, is a small perturbation parameter and is a periodic vector function in with the period .




If , then there is an unperturbed system


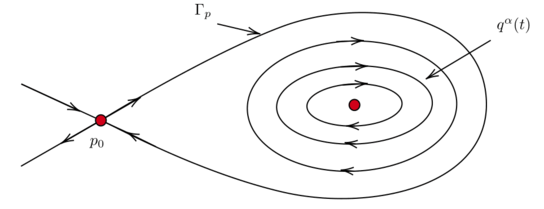
From this system (3), looking at the phase space in Figure 1, consider the following assumptions
- A1 - The system has a hyperbolic fixed point , connected to itself by a homoclinic orbit
- A2 - The system is filled inside by a continuous family of periodic orbits of period with where







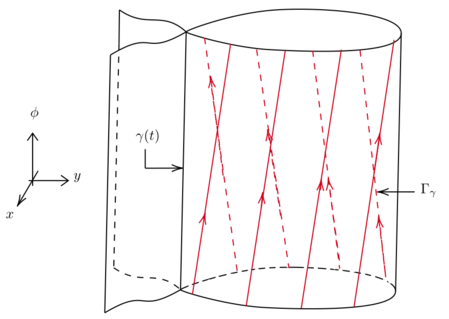
To obtain the Melnikov function, some tricks have to be used, for example, to get rid of the time dependence and to gain geometrical advantages new coordinate has to be used that is cyclic type given by Then, the system (1) could be rewritten in vector form as follows




Hence, looking at Figure 2, the three-dimensional phase space where and has the hyperbolic fixed point of the unperturbed system becoming a periodic orbit The two-dimensional stable and unstable manifolds of by and are denoted, respectively. By the assumption and coincide along a two-dimensional homoclinic manifold. This is denoted by where is the time of flight from a point to the point on the homoclinic connection.










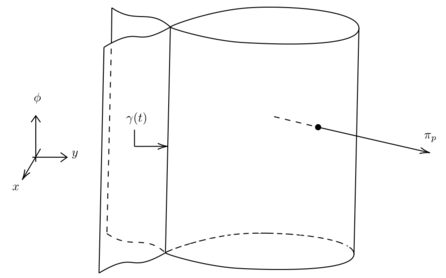
In the Figure 3, for any point a vector is constructed , normal to the as follows Thus varying and serve to move to every point on



Splitting of stable and unstable manifolds
If is sufficiently small, which is the system (2), then becomes becomes and the stable and unstable manifolds become different from each other. Furthermore, for this sufficiently small in a neighborhood the periodic orbit of the unperturbed vector field (3) persists as a periodic orbit, Moreover, and are -close to and respectively.










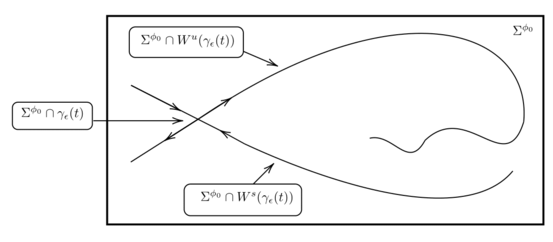



Consider the following cross-section of the phase space then and are the trajectories of the



unperturbed and perturbed vector fields, respectively. The projections of these trajectories onto are given by and Looking at the Figure 4, splitting of and is defined hence, consider the points that intersect transversely as and , respectively. Therefore, it is natural to define the distance between and at the point denoted by and it can be rewritten as Since and lie on and and then can be rewritten by












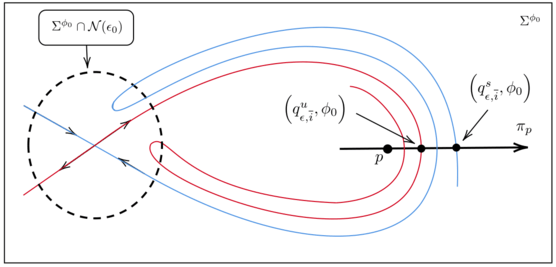


The manifolds and may intersect in more than one point as shown in Figure 5. For it to be possible, after every intersection, for sufficiently small, the trajectory must pass through again.

Deduction of the Melnikov function
Expanding in Taylor series the eq. (5) about gives us where and




When then the Melnikov function is defined to be


since is not zero on , considering finite and


Using eq. (6) it will require knowing the solution to the perturbed problem. To avoid this, Melnikov defined a time dependent Melnikov function

Where and are the trajectories starting at and respectively. Taking the time-derivative of this function allows for some simplifications. The time-derivative of one of the terms in eq. (7) is





From the equation of motion, then


Plugging equations (2) and (9) back into (8) gives

The first two terms on the right hand side can be verified to cancel by explicitly evaluating the matrix multiplications and dot products. has been reparameterized to .


Integrating the remaining term, the expression for the original terms does not depend on the solution of the perturbed problem.

The lower integration bound has been chosen to be the time where , so that and therefore the boundary terms are zero.


Combining these terms and setting the final form for the Melnikov distance is obtained by


Then, using this equation, the following theorem
Theorem 1: Suppose there is a point such that

- i) and
- ii) .


Then, for sufficiently small, and intersect transversely at Moreover, if for all , then




Simple zeros of the Melnikov function imply chaos
From theorem 1 when there is a simple zero of the Melnikov function implies in transversal intersections of the stable and manifolds that results in a homoclinic tangle. Such tangle is a very complicated structure with the stable and unstable manifolds intersecting an infinite number of times.
Consider a small element of phase volume, departing from the neighborhood of a point near the transversal intersection, along the unstable manifold of a fixed point. Clearly, when this volume element approaches the hyperbolic fixed point it will be distorted considerably, due to the repetitive infinite intersections and stretching (and folding) associated with the relevant invariant sets. Therefore, it is reasonably expect that the volume element will undergo an infinite sequence of stretch and fold transformations as the horseshoe map. Then, this intuitive expectation is rigorously confirmed by a theorem stated as follows
Theorem 2: Suppose that a diffeomorphism where is an n-dimensional manifold, has a hyperbolic fixed point with a stable and unstable manifold that intersect transversely at some point , where Then, contains a hyperbolic set invariant under on which is topologically conjugate to a shift on finitely many symbols.











Thus, according to the theorem 2, it implies that the dynamics with a transverse homoclinic point is topologically similar to the horseshoe map and it has the property of sensitivity to initial conditions and hence when the Melnikov distance (10) has a simple zero, it implies that the system is chaotic.
References
- Poincaré, Henri (1890). "Sur le problème des trois corps et les équations de la dynamique". Acta Mathematica. 13: 1–270.
- Melnikov, V. K. (1963). "On the stability of a center for time-periodic perturbations". Tr. Mosk. Mat. Obs. 12: 3–52.
- John., Guckenheimer (2013-11-21). Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. Holmes, Philip, 1945-. New York. ISBN 9781461211402. OCLC 883383500.
- Aleksandrovich), Kuznet︠s︡ov, I︠U︡. A. (I︠U︡riĭ (2004). Elements of Applied Bifurcation Theory (Third ed.). New York, NY: Springer New York. ISBN 9781475739787. OCLC 851800234.
- Stephen, Wiggins (2003). Introduction to applied nonlinear dynamical systems and chaos (Second ed.). New York: Springer. ISBN 978-0387217499. OCLC 55854817.
- Awrejcewicz, Jan; Holicke, Mariusz M (September 2007). Smooth and Nonsmooth High Dimensional Chaos and the Melnikov-Type Methods. Smooth and Nonsmooth High Dimensional Chaos and the Melinkov-Type Methods. Edited by Awrejcewicz Jan & Holicke Mariusz M. Published by World Scientific Publishing Co. Pte. Ltd. World Scientific Series on Nonlinear Science Series A. WORLD SCIENTIFIC. Bibcode:2007snhd.book.....A. doi:10.1142/6542. ISBN 9789812709097.
- Alemansour, Hamed; Miandoab, Ehsan Maani; Pishkenari, Hossein Nejat (2017-03-01). "Effect of size on the chaotic behavior of nano resonators". Communications in Nonlinear Science and Numerical Simulation. 44: 495–505. Bibcode:2017CNSNS..44..495A. doi:10.1016/j.cnsns.2016.09.010. ISSN 1007-5704.