Identity (mathematics)
In mathematics, an identity is an equality relating one mathematical expression A to another mathematical expression B, such that A and B (which might contain some variables) produce the same value for all values of the variables within a certain range of validity.[1][2] In other words, A = B is an identity if A and B define the same functions, and an identity is an equality between functions that are differently defined. For example, and are identities.[2] Identities are sometimes indicated by the triple bar symbol ≡ instead of =, the equals sign.[3]





Common identities
Algebraic identities
Certain identities, such as and , form the basis of algebra,[4] while other identities, such as and , can be useful in simplifying algebraic expressions and expanding them.[5]



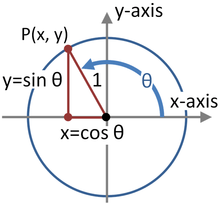
Trigonometric identities
Geometrically, trigonometric identities are identities involving certain functions of one or more angles.[6] They are distinct from triangle identities, which are identities involving both angles and side lengths of a triangle. Only the former are covered in this article.
These identities are useful whenever expressions involving trigonometric functions need to be simplified. Another important application is the integration of non-trigonometric functions: a common technique which involves first using the substitution rule with a trigonometric function, and then simplifying the resulting integral with a trigonometric identity.
One of the most prominent examples of trigonometric identities involves the equation which is true for all complex values of (since the complex numbers form the domain of sine and cosine). On the other hand, the equation



is only true for certain values of , not all (nor for all values in a neighborhood). For example, this equation is true when but false when .


Another group of trigonometric identities concerns the so-called addition/subtraction formulas (e.g. the double-angle identity , the addition formula for ),[3][1] which can be used to break down expressions of larger angles into those with smaller constituents.


Exponential identities
The following identities hold for all integer exponents, provided that the base is non-zero:

Unlike addition and multiplication, exponentiation is not commutative. For example, 2 + 3 = 3 + 2 = 5 and 2 · 3 = 3 · 2 = 6, but 23 = 8, whereas 32 = 9.
And unlike addition and multiplication, exponentiation is not associative either. For example, (2 + 3) + 4 = 2 + (3 + 4) = 9 and (2 · 3) · 4 = 2 · (3 · 4) = 24, but 23 to the 4 is 84 (or 4,096), whereas 2 to the 34 is 281 (or 2,417,851,639,229,258,349,412,352). Without parentheses to modify the order of calculation, by convention the order is top-down, not bottom-up:

Logarithmic identities
Several important formulas, sometimes called logarithmic identities or log laws, relate logarithms to one another.[7]
Product, quotient, power and root
The logarithm of a product is the sum of the logarithms of the numbers being multiplied; the logarithm of the ratio of two numbers is the difference of the logarithms. The logarithm of the p-th power of a number is p times the logarithm of the number itself; the logarithm of a p-th root is the logarithm of the number divided by p. The following table lists these identities with examples. Each of the identities can be derived after substitution of the logarithm definitions x = blogb(x), and/or y = blogb(y), in the left hand sides.
| Formula | Example | |
|---|---|---|
| product | ||
| quotient | ||
| power | ||
| root |








Change of base
The logarithm logb(x) can be computed from the logarithms of x and b with respect to an arbitrary base k using the following formula:

Typical scientific calculators calculate the logarithms to bases 10 and e.[8] Logarithms with respect to any base b can be determined using either of these two logarithms by the previous formula:

Given a number x and its logarithm logb(x) to an unknown base b, the base is given by:

Hyperbolic function identities
The hyperbolic functions satisfy many identities, all of them similar in form to the trigonometric identities. In fact, Osborn's rule[9] states that one can convert any trigonometric identity into a hyperbolic identity by expanding it completely in terms of integral powers of sines and cosines, changing sine to sinh and cosine to cosh, and switching the sign of every term which contains a product of 2, 6, 10, 14, ... sinhs.[10]
The Gudermannian function gives a direct relationship between the circular functions and the hyperbolic ones that does not involve complex numbers.
Logic and universal algebra
In mathematical logic and in universal algebra, an identity is defined as a formula of the form "∀x1,...,xn. s = t", where s and t are terms with no other free variables than x1,...,xn. The quantifier prefix ("∀x1,...,xn.") is often left implicit, in particular in universal algebra. For example, the axioms of a monoid are often given as the identity set
- { ∀x,y,z. x*(y*z)=(x*y)*z , ∀x. x*1=x , ∀x. 1*x=x },
or, in short notation, as
- { x*(y*z)=(x*y)*z , x*1=x , 1*x=x }.
Some authors use the name "equation" rather than "identity".[11][12]
References
- "The Definitive Glossary of Higher Mathematical Jargon — Identity". Math Vault. 2019-08-01. Retrieved 2019-12-01.
- "Mathwords: Identity". www.mathwords.com. Retrieved 2019-12-01.
- "Identity - math word definition - Math Open Reference". www.mathopenref.com. Retrieved 2019-12-01.
- "Basic Identities". www.math.com. Retrieved 2019-12-01.
- "Algebraic Identities". www.sosmath.com. Retrieved 2019-12-01.
- Stapel, Elizabeth. "Trigonometric Identities". Purplemath. Retrieved 2019-12-01.
- All statements in this section can be found in Shailesh Shirali 2002, section 4, (Douglas Downing 2003, p. 275), or Kate & Bhapkar 2009, p. 1-1, for example.
- Bernstein, Stephen; Bernstein, Ruth (1999), Schaum's outline of theory and problems of elements of statistics. I, Descriptive statistics and probability, Schaum's outline series, New York: McGraw-Hill, ISBN 978-0-07-005023-5, p. 21
- Osborn, G. (1 January 1902). "109. Mnemonic for Hyperbolic Formulae". The Mathematical Gazette. 2 (34): 189. doi:10.2307/3602492. JSTOR 3602492.
- Peterson, John Charles (2003). Technical mathematics with calculus (3rd ed.). Cengage Learning. p. 1155. ISBN 0-7668-6189-9., Chapter 26, page 1155
- Nachum Dershowitz; Jean-Pierre Jouannaud (1990). "Rewrite Systems". In Jan van Leeuwen (ed.). Formal Models and Semantics. Handbook of Theoretical Computer Science. B. Elsevier. pp. 243–320.
- Wolfgang Wechsler (1992). Wilfried Brauer; Grzegorz Rozenberg; Arto Salomaa (eds.). Universal Algebra for Computer Scientists. EATCS Monographs on Theoretical Computer Science. 25. Berlin: Springer. ISBN 3-540-54280-9. Here: Def.1 of Sect.3.2.1, p.160.
External links
| Wikimedia Commons has media related to Identity (mathematics). |
- The Encyclopedia of Equation Online encyclopedia of mathematical identities (archived)
- A Collection of Algebraic Identities