Fibre-optic gyroscope
A fibre-optic gyroscope (FOG) senses changes in orientation using the Sagnac effect, thus performing the function of a mechanical gyroscope. However its principle of operation is instead based on the interference of light which has passed through a coil of optical fibre, which can be as long as 5 kilometres (3 mi).
Operation
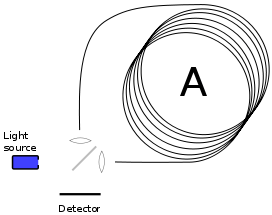
Two beams from a laser are injected into the same fibre but in opposite directions. Due to the Sagnac effect, the beam travelling against the rotation experiences a slightly shorter path delay than the other beam. The resulting differential phase shift is measured through interferometry, thus translating one component of the angular velocity into a shift of the interference pattern which is measured photometrically.
Beam splitting optics launches light from a laser diode into two waves propagating in the clockwise and anticlockwise directions through a coil consisting of many turns of optical fibre. The strength of the Sagnac effect is dependent on the effective area of the closed optical path: this is not simply the geometric area of the loop but is enhanced by the number of turns in the coil. The FOG was first proposed by Vali and Shorthill[1] in 1976. Development of both the passive interferometer type of FOG, or IFOG, and a newer concept, the passive ring resonator FOG, or RFOG, is proceeding in many companies and establishments worldwide.[2]
Advantages
A FOG provides extremely precise rotational rate information, in part because of its lack of cross-axis sensitivity to vibration, acceleration, and shock. Unlike the classic spinning-mass gyroscope or resonant/mechanical gyroscopes, the FOG has no moving parts and doesn't rely on inertial resistance to movement. Hence, the FOG is an excellent alternative to a mechanical gyroscope. Because of their intrinsic reliability and long lifetime, FOGs are used for high performance space applications [3] and military inertial navigation systems.
The FOG typically shows a higher resolution than a ring laser gyroscope.
FOGs are implemented in both open-loop and closed-loop configurations.
Disadvantages
Like all other gyroscope technologies and depending on detailed FOG design, FOGs may require initial calibration (determining which indication corresponds to zero angular velocity).
Some FOG designs are somewhat sensitive to vibrations[4]. However, when coupled with multiple-axis FOG and accelerometers and hybridized with GNSS data, the impact is mitigated, making FOG systems suitable for high shock environments, including gun pointing systems for 105mm and 155mm howitzers.
Applications
- FOGs are used in Attitude and Heading Reference System (AHRS) [5] [6]dedicated to aviation, maritime and Defence applications
- FOGs are used in Fibre optic gyrocompasses.[7]
- FOGs are used in the inertial navigation systems of some guided missiles, underwater vehicles and other vehicles requiring resilient navigation.[8]
- FOGs can be a navigation aid in remotely operated vehicles and autonomous underwater vehicles.[9][10]
- FOGs are used on surface vessels and submarines as main navigation systems. [11] [12]
- FOGs are used on land defence vehicles or weapons for accurate pointing and positioning.
- FOGs are used in surveying.
See also
References
- Vali, V.; Shorthill, R. W. (1976). "Fiber ring interferometer". Applied Optics. 15 (5): 1099–100. Bibcode:1976ApOpt..15.1099V. doi:10.1364/AO.15.001099. PMID 20165128.
- Lefèvre, Hervé (1993). The Fiber-Optic Gyroscope. ARTECH HOUSE, INC. ISBN 0-89006-537-3.
- "Astrix® 1000".
- Chen, Xiyuan; Wang, Wei (2017). "Extracting and compensating for FOG vibration error based on improved empirical mode decomposition with masking signal". Applied Optics. 56 (13): 3848–3856. Bibcode:2017ApOpt..56.3848C. doi:10.1364/AO.56.003848. PMID 28463278.
- "Sagem delivers 10,000th APIRS inertial reference system, for an ATR 72-600 regional turboprop". Safran Electronics & Defense. 2014-11-21. Retrieved 2019-01-03.
- "LCR-100 / LCR-100N". northropgrumman.litef.com. Retrieved 2019-01-03.
- Seamanship Techniques:Shipboard and Marine Operations, D. J. House, Butterworth-Heinemann, 2004, p. 341
- "Full-text search".
- "Archived copy". Archived from the original on 2012-09-29. Retrieved 2012-06-24.CS1 maint: archived copy as title (link)
- "Subsea Inertial Navigation | ixblue".
- "Inertial Navigation for Naval Forces | ixblue".
- "SAS 2019: Northrop Grumman Unveils SeaFind Next Gen Maritime INS". 2019-05-12.
Sources
- Anthony Lawrence, Modern Inertial Technology: Navigation, Guidance, and Control, Springer, Chapters 11 and 12 (pages 169–207), 1998. ISBN 0-387-98507-7.
- Pavlath, G.A. (1994). "Fiber-optic gyroscopes". Proceedings of LEOS'94. 2. pp. 237–238. doi:10.1109/LEOS.1994.586467. ISBN 0-7803-1470-0.
- R.P.G. Collinson, Introduction to Avionics Systems, 2003 Kluwer Academic Publishers, Boston. ISBN 1-4020-7278-3.
- José Miguel López-Higuer, Handbook of Fibre Optic Sensing Technology, 2000, John Wiley & Sons Ltd.
- Hervé Lefèvre, The Fiber-Optic Gyroscope, 1993, Artech House. ISBN 0-89006-537-3.