Eigensystem realization algorithm
The Eigensystem realization algorithm (ERA) is a system identification technique popular in civil engineering, in particular in structural health monitoring. ERA can be used as a modal analysis technique and generates a system realization using the time domain response (multi-)input and (multi-)output data.[1] The ERA was proposed by Juang and Pappa [2] and has been used for system identification of aerospace structures such as the Galileo spacecraft,[3] turbines,[4] civil structures [5][6] and many other type of systems.
Uses in structural engineering
In structural engineering the ERA is used to identify natural frequencies, mode shapes and damping ratios. The ERA is commonly used in conjunction with the Natural Excitation Technique (NExT) to identify modal parameters from ambient vibration. The technique has been applied to buildings, bridges, and many other type of structural systems. In the area of structural health monitoring the ERA and other modal identification techniques play an important role in developing a model of the structure from experimental data. The state space representation, or the modal parameters are used for further analysis and identify possible damage in structures.
Algorithm
It is recommended to review the concepts of State-space representation and vibration before studying the ERA. Given pulse response data form the Hankel matrix

where is the pulse response at time step . Next, perform a singular value decomposition of , i.e. . Then choose only the rows and columns corresponding to physical modes to form the matrices . Then the discrete time system realization can be given by:









To generate the system states where is the matrix of eigenvectors for .[5]



Example
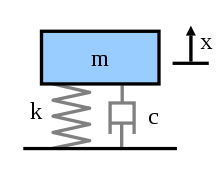
Consider a single degree of freedom (SDOF) system with stiffness , mass , and damping . The equation of motion for this SDOF is



where is the displacement of the mass and is time. The continuous state-space representation of this system is




where represent the states of the system corresponding to the displacement and velocity of the SDOF. Note that the states are usually denoted by . However, here is used for the SDOF displacement.


See also
- Frequency domain decomposition
- Stochastic subspace identification
- ERA/DC
References
- Marlon D. Hill. "An Experimental Verification of the Eigensystem Realization Algorithm for Vibration Parameter Identification" (PDF). Archived from the original (PDF) on March 31, 2012. Retrieved August 24, 2011.
- Juang, J.-N.; Pappa, R. S. (1985). "An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction". Journal of Guidance, Control, and Dynamics. 8 (5): 620–627. Bibcode:1985JGCD....8..620J. doi:10.2514/3.20031.
- Pappa, Richard S., and J-N. Juang. "Galileo spacecraft modal identification using an eigensystem realization algorithm." Structures, Structural Dynamics and Materials Conference, 25 th, Palm Springs, CA. 1984.
- Sanchez-Gasca, J. J. "Computation of turbine-generator subsynchronous torsional modes from measured data using the eigensystem realization algorithm." Power Engineering Society Winter Meeting, 2001. IEEE. Vol. 3. IEEE, 2001.
- Juan Martin Caicedo; Shirley J. Dyke; Erik A. Johnson (2004). "Natural Excitation Technique and Eigensystem Realization Algorithm for Phase I of the IASC-ASCE Benchmark Problem: Simulated Data". Journal of Engineering Mechanics. 130 (1): 49–60. doi:10.1061/(asce)0733-9399(2004)130:1(49).
- Brownjohn, James Mark William; Moyo, Pilate; Omenzetter, Piotr; Lu, Yong (2003). "Assessment of Highway Bridge Upgrading by Dynamic Testing and Finite-Element Model Updating". Journal of Bridge Engineering. 8 (3): 162–172. CiteSeerX 10.1.1.194.8245. doi:10.1061/(ASCE)1084-0702(2003)8:3(162). ISSN 1084-0702.