Covector mapping principle
The covector mapping principle is a special case of Riesz' representation theorem, which is a fundamental theorem in functional analysis. The name was coined by Ross and co-workers,[1][2][3][4][5][6] It provides conditions under which dualization can be commuted with discretization in the case of computational optimal control.
Description
An application of Pontryagin's minimum principle to Problem , a given optimal control problem generates a boundary value problem. According to Ross, this boundary value problem is a Pontryagin lift and is represented as Problem .


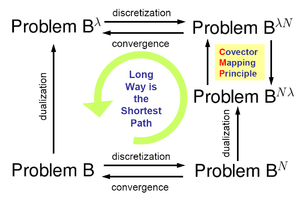
Now suppose one discretizes Problem . This generates Problem where represents the number of discrete points. For convergence, it is necessary to prove that as



In the 1960s Kalman and others[8] showed that solving Problem is extremely difficult. This difficulty, known as the curse of complexity,[9] is complementary to the curse of dimensionality.
In a series of papers starting in the late 1990s, Ross and Fahroo showed that one could arrive at a solution to Problem (and hence Problem ) more easily by discretizing first (Problem ) and dualizing afterwards (Problem ). The sequence of operations must be done carefully to ensure consistency and convergence. The covector mapping principle asserts that a covector mapping theorem can be discovered to map the solutions of Problem to Problem thus completing the circuit.


References
- Ross, I. M., “A Historical Introduction to the Covector Mapping Principle,” Proceedings of the 2005 AAS/AIAA Astrodynamics Specialist Conference, August 7–11, 2005 Lake Tahoe, CA. AAS 05-332.
- Q. Gong, I. M. Ross, W. Kang, F. Fahroo, Connections between the covector mapping theorem and convergence of pseudospectral methods for optimal control, Computational Optimization and Applications, Vol. 41, pp. 307–335, 2008
- Ross, I. M. and Fahroo, F., “Legendre Pseudospectral Approximations of Optimal Control Problems,” Lecture Notes in Control and Information Sciences, Vol. 295, Springer-Verlag, New York, 2003, pp 327–342.
- Ross, I. M. and Fahroo, F., “Discrete Verification of Necessary Conditions for Switched Nonlinear Optimal Control Systems,” Proceedings of the American Control Conference, June 2004, Boston, MA
- Ross, I. M. and Fahroo, F., “A Pseudospectral Transformation of the Covectors of Optimal Control Systems,” Proceedings of the First IFAC Symposium on System Structure and Control, Prague, Czech Republic, 29–31 August 2001.
- W. Kang, I. M. Ross, Q. Gong, Pseudospectral optimal control and its convergence theorems, Analysis and Design of Nonlinear Control Systems, Springer, pp.109–124, 2008.
- I. M. Ross and F. Fahroo, A Perspective on Methods for Trajectory Optimization, Proceedings of the AIAA/AAS Astrodynamics Conference, Monterey, CA, August 2002. Invited Paper No. AIAA 2002-4727.
- Bryson, A.E. and Ho, Y.C. Applied optimal control. Hemisphere, Washington, DC, 1969.
- Ross, I. M. A Primer on Pontryagin's Principle in Optimal Control. Collegiate Publishers. Carmel, CA, 2009. ISBN 978-0-9843571-0-9.