Convenient vector space
In mathematics, convenient vector spaces are locally convex vector spaces satisfying a very mild completeness condition.
Traditional differential calculus is effective in the analysis of finite-dimensional vector spaces and for Banach spaces. Beyond Banach spaces, difficulties begin to arise; in particular, composition of continuous linear mappings stop being jointly continuous at the level of Banach spaces,[Note 1] for any compatible topology on the spaces of continuous linear mappings.
Mappings between convenient vector spaces are smooth or if they map smooth curves to smooth curves. This leads to a Cartesian closed category of smooth mappings between -open subsets of convenient vector spaces (see property 6 below). The corresponding calculus of smooth mappings is called convenient calculus. It is weaker than any other reasonable notion of differentiability, it is easy to apply, but there are smooth mappings which are not continuous (see Note 1). This type of calculus alone is not useful in solving equations[Note 2].


The -topology
Let be a locally convex vector space. A curve is called smooth or if all derivatives exist and are continuous. Let be the space of smooth curves. It can be shown that the set of smooth curves does not depend entirely on the locally convex topology of , only on its associated bornology (system of bounded sets); see [KM], 2.11. The final topologies with respect to the following sets of mappings into coincide; see [KM], 2.13.



- .
- The set of all Lipschitz curves (so that is bounded in , for each ).
- The set of injections where runs through all bounded absolutely convex subsets in , and where is the linear span of equipped with the Minkowski functional .
- The set of all Mackey-convergent sequences (there exists a sequence with bounded).









This topology is called the -topology on and we write for the resulting topological space. In general (on the space of smooth functions with compact support on the real line, for example) it is finer than the given locally convex topology, it is not a vector space topology, since addition is no longer jointly continuous. Namely, even . The finest among all locally convex topologies on which are coarser than is the bornologification of the given locally convex topology. If is a Fréchet space, then .




Convenient vector spaces
A locally convex vector space is said to be a convenient vector space if one of the following equivalent conditions holds (called -completeness); see [KM], 2.14.
- For any the (Riemann-) integral exists in .
- Any Lipschitz curve in is locally Riemann integrable.
- Any scalar wise curve is : A curve is smooth if and only if the composition is in for all where is the dual of all continuous linear functionals on .
- Equivalently, for all , the dual of all bounded linear functionals.
- Equivalently, for all , where is a subset of which recognizes bounded subsets in ; see [KM], 5.22.
- Any Mackey-Cauchy-sequence (i.e., for some in converges in . This is visibly a mild completeness requirement.
- If is bounded closed absolutely convex, then is a Banach space.
- If is scalar wise , then is , for .
- If is scalar wise then is differentiable at .


















Here a mapping is called if all derivatives up to order exist and are Lipschitz, locally on .

Smooth mappings
Let and be convenient vector spaces, and let be -open. A mapping is called smooth or , if the composition for all . See [KM], 3.11.





Main properties of smooth calculus
1. For maps on Fréchet spaces this notion of smoothness coincides with all other reasonable definitions. On this is a non-trivial theorem, proved by Boman, 1967. See also [KM], 3.4.

2. Multilinear mappings are smooth if and only if they are bounded ([KM], 5.5).
3. If is smooth then the derivative is smooth, and also is smooth where denotes the space of all bounded linear mappings with the topology of uniform convergence on bounded subsets; see [KM], 3.18.




4. The chain rule holds ([KM], 3.18).
5. The space of all smooth mappings is again a convenient vector space where the structure is given by the following injection, where carries the topology of compact convergence in each derivative separately; see [KM], 3.11 and 3.7.



6. The exponential law holds ([KM], 3.12): For -open the following mapping is a linear diffeomorphism of convenient vector spaces.


This is the main assumption of variational calculus. Here it is a theorem. This property is the source of the name convenient, which was borrowed from (Steenrod 1967).
7. Smooth uniform boundedness theorem ([KM], theorem 5.26). A linear mapping is smooth (by (2) equivalent to bounded) if and only if is smooth for each .



8. The following canonical mappings are smooth. This follows from the exponential law by simple categorical reasonings, see [KM], 3.13.

Related convenient calculi
Convenient calculus of smooth mappings appeared for the first time in [Frölicher, 1981], [Kriegl 1982, 1983]. Convenient calculus (having properties 6 and 7) exists also for:
- Real analytic mappings (Kriegl, Michor, 1990; see also [KM], chapter II).
- Holomorphic mappings (Kriegl, Nel, 1985; see also [KM], chapter II). The notion of holomorphy is that of [Fantappié, 1930-33].
- Many classes of Denjoy Carleman ultradifferentiable functions, both of Beurling type and of Roumieu-type [Kriegl, Michor, Rainer, 2009, 2011, 2015].
- With some adaptations, , [FK].
- With more adaptations, even (i.e., the -th derivative is Hölder-continuous with index ) ([Faure, 1989], [Faure, These Geneve, 1991]).



The corresponding notion of convenient vector space is the same (for their underlying real vector space in the complex case) for all these theories.
Application: Manifolds of mappings between finite dimensional manifolds
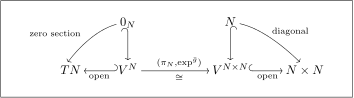
The exponential law 6 of convenient calculus allows for very simple proofs of the basic facts about manifolds of mappings. Let and be finite dimensional smooth manifolds where is compact. We use an auxiliary Riemann metric on . The Riemannian exponential mapping of is described in the following diagram:



It induces an atlas of charts on the space of all smooth mappings as follows. A chart centered at , is:






Now the basics facts follow in easily. Trivializing the pull back vector bundle and applying the exponential law 6 leads to the diffeomorphism


All chart change mappings are smooth () since they map smooth curves to smooth curves:

Thus is a smooth manifold modeled on Fréchet spaces. The space of all smooth curves in this manifold is given by

Since it visibly maps smooth curves to smooth curves, composition

is smooth. As a consequence of the chart structure, the tangent bundle of the manifold of mappings is given by

Regular Lie groups
Let be a connected smooth Lie group modeled on convenient vector spaces, with Lie algebra . Multiplication and inversion are denoted by:



The notion of a regular Lie group is originally due to Omori et al. for Fréchet Lie groups, was weakened and made more transparent by J. Milnor, and was then carried over to convenient Lie groups; see [KM], 38.4.
A Lie group is called regular if the following two conditions hold:
- For each smooth curve in the Lie algebra there exists a smooth curve in the Lie group whose right logarithmic derivative is . It turn out that is uniquely determined by its initial value , if it exists. That is,






If is the unique solution for the curve required above, we denote

- The following mapping is required to be smooth:

If is a constant curve in the Lie algebra, then is the group exponential mapping.

Theorem. For each compact manifold , the diffeomorphism group is a regular Lie group. Its Lie algebra is the space of all smooth vector fields on , with the negative of the usual bracket as Lie bracket.


Proof: The diffeomorphism group is a smooth manifold since it is an open subset in . Composition is smooth by restriction. Inversion is smooth: If is a smooth curve in , then f(t, )−1
satisfies the implicit equation
, so by the finite dimensional implicit function theorem, is smooth. So inversion maps smooth curves to smooth curves, and thus inversion is smooth.
Let be a time dependent vector field on (in ).
Then the flow operator of the corresponding autonomous vector field on induces the evolution operator via











which satisfies the ordinary differential equation

Given a smooth curve in the Lie algebra, , then the solution of the ordinary differential equation depends smoothly also on the further variable , thus maps smooth curves of time dependent vector fields to smooth curves of diffeomorphism. QED.



The principal bundle of embeddings
For finite dimensional manifolds and with compact, the space of all smooth embeddings of into , is open in , so it is a smooth manifold. The diffeomorphism group acts freely and smoothly from the right on .

Theorem: is a principal fiber bundle with structure group .

Proof: One uses again an auxiliary Riemannian metric on . Given , view as a submanifold of , and split the restriction of the tangent bundle to into the subbundle normal to and tangential to as . Choose a tubular neighborhood





If is -near to , then



This is the required local splitting. QED
Further applications
An overview of applications using geometry of shape spaces and diffeomorphism groups can be found in [Bauer, Bruveris, Michor, 2014].
Notes
- An example of a composition mapping is the evaluation mapping , where is a locally convex vector space, and where is its dual of continuous linear functionals equipped with any locally convex topology such that the evaluation mapping is separately continuous. If the evaluation is assumed to be jointly continuous, then there are neighborhoods and of zero such that . However, this means that is contained in the polar of the open set ; so it is bounded in . Thus admits a bounded neighborhood of zero, and is thus a normed vector space.
- In order to be useful for solving equations like nonlinear PDE's, convenient calculus has to be supplemented by, for example, a priori estimates which help to create enough Banach space situation to allow convergence of some iteration procedure; for example, see the Nash–Moser theorem, described in terms of convenient calculus in [KM], section 51.




References
- Bauer, M., Bruveris, M., Michor, P.W.: Overview of the Geometries of Shape Spaces and Diffeomorphism Groups. Journal of Mathematical Imaging and Vision, 50, 1-2, 60-97, 2014. (arXiv:1305.11500)
- Boman, J.: Differentiability of a function and of its composition with a function of one variable, Mathematica Scandinavia vol. 20 (1967), 249–268.
- Faure, C.-A.: Sur un théorème de Boman, C. R. Acad. Sci., Paris}, vol. 309 (1989), 1003–1006.
- Faure, C.-A.: Théorie de la différentiation dans les espaces convenables, These, Université de Genève, 1991.
- Frölicher, A.: Applications lisses entre espaces et variétés de Fréchet, C. R. Acad. Sci. Paris, vol. 293 (1981), 125–127.
- [FK] Frölicher, A., Kriegl, A.: Linear spaces and differentiation theory. Pure and Applied Mathematics, J. Wiley, Chichester, 1988.
- Kriegl, A.: Die richtigen Räume für Analysis im Unendlich – Dimensionalen, Monatshefte für Mathematik vol. 94 (1982) 109–124.
- Kriegl, A.: Eine kartesisch abgeschlossene Kategorie glatter Abbildungen zwischen beliebigen lokalkonvexen Vektorräumen, Monatshefte für Mathematik vol. 95 (1983) 287–309.
- [KM] Kriegl, A., Michor, P.W.: The Convenient Setting of Global Analysis. Mathematical Surveys and Monographs, Volume: 53, American Mathematical Society, Providence, 1997. (pdf)
- Kriegl, A., Michor, P. W., Rainer, A.: The convenient setting for non-quasianalytic Denjoy–Carleman differentiable mappings, Journal of Functional Analysis, vol. 256 (2009), 3510–3544. (arXiv:0804.2995)
- Kriegl, A., Michor, P. W., Rainer, A.: The convenient setting for quasianalytic Denjoy–Carleman differentiable mappings, Journal of Functional Analysis, vol. 261 (2011), 1799–1834. (arXiv:0909.5632)
- Kriegl, A., Michor, P. W., Rainer, A.: The convenient setting for Denjoy-Carleman differentiable mappings of Beurling and Roumieu type. Revista Matemática Complutense (2015). doi:10.1007/s13163-014-0167-1. (arXiv:1111.1819)
- Michor, P.W.: Manifolds of mappings and shapes. (arXiv:1505.02359)
- Steenrod, N. E.: A convenient category for topological spaces, Michigan Mathematical Journal, vol. 14 (1967), 133–152.