Constraint (classical mechanics)
In classical mechanics, a constraint on a system is a parameter that the system must obey. For example, a box sliding down a slope must remain on the slope. There are two different types of constraints: holonomic and non-holonomic.[1]
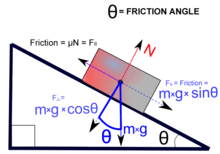
In this system the box slides down a slope, the constraint is that the box must remain on the slope (it cannot go through it or start flying).
Types of constraint
- First class constraints and second class constraints
- Primary constraints, secondary constraints, tertiary constraints, quaternary constraints.
- Holonomic constraints, also called integrable constraints, (depending on time and the coordinates but not on the momenta) and Nonholonomic system
- Pfaffian constraints
- Scleronomic constraints (not depending on time) and rheonomic constraints (depending on time).
- Ideal constraints: those for which the work done by the constraint forces under a virtual displacement vanishes.
gollark: Are you one of those very anti-JS people or do you just dislike my UI?
gollark: It's backed by SQLite full text search so it has phrase/near/or/not/and queries and slight fuzziness.
gollark: It has a nice search UI now, using some JS so you can type and get results in real time as you do.
gollark: My eternally unfinished wiki thing is becoming less eternally unfinished.
gollark: Void Linux is neat. It uses runit.
References
- Leach, Dr Andrew (2001-01-30). Molecular Modelling: Principles and Applications (2nd ed.). Harlow: Prentice Hall. pp. 369–370. ISBN 9780582382107.
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.