Ethernet over twisted pair
Ethernet over twisted pair technologies use twisted-pair cables for the physical layer of an Ethernet computer network. They are a subset of all Ethernet physical layers.


Early Ethernet used various grades of coaxial cable, but in 1984, StarLAN showed the potential of simple unshielded twisted pair. This led to the development of 10BASE-T and its successors 100BASE-TX, 1000BASE-T and 10GBASE-T, supporting speeds of 10 and 100 megabit per second, then 1 and 10 gigabit per second respectively.[lower-alpha 1]
All these standards use 8P8C modular connectors,[lower-alpha 2] and supported cable standards range from Cat 3 to Cat 8. These cables typically have four pairs of wires for each connection although early Ethernet used only two of the pairs.
History
The first two early designs of twisted pair networking were StarLAN, standardized by the IEEE Standards Association as IEEE 802.3e in 1986, at one megabit per second,[2] and LattisNet, developed in January 1987, at 10 megabit per second.[3][4] Both were developed before the 10BASE-T standard (published in 1990 as IEEE 802.3i) and used different signalling, so they were not directly compatible with it.[5]
In 1988, AT&T released StarLAN 10, named for working at 10 Mbit/s.[6] The StarLAN 10 signalling was used as the basis of 10BASE-T, with the addition of link beat to quickly indicate connection status.[lower-alpha 3]
Using twisted pair cabling, in a star topology, for Ethernet addressed several weaknesses of the previous standards:
- Twisted pair cables were already in use for telephone service and were already present in many office buildings, lowering overall cost
- The centralized star topology already in use for telephone service and was a more common approach to cabling than the bus in earlier standards and easier to manage
- Using point-to-point links was less prone to failure and greatly simplified troubleshooting compared to a shared bus
- Exchanging cheap repeater hubs for more advanced switching hubs provided a viable upgrade path
- Mixing different speeds in a single network became possible with the arrival of Fast Ethernet
- Depending on cable grades, subsequent upgrading to Gigabit Ethernet or faster could be accomplished by replacing the network switches
Although 10BASE-T is rarely used as a normal-operation signaling rate today, it is still in wide use with network interface controllers in Wake-on-LAN power-down mode and for special, low-power, low-bandwidth applications. 10BASE-T is still supported on most twisted-pair Ethernet ports with up to Gigabit Ethernet speed.
Naming
The common names for the standards derive from aspects of the physical media. The leading number (10 in 10BASE-T) refers to the transmission speed in Mbit/s. BASE denotes that baseband transmission is used. The T designates twisted pair cable. Where there are several standards for the same transmission speed, they are distinguished by a letter or digit following the T, such as TX or T4, referring to the encoding method and number of lanes.[8]
Cabling
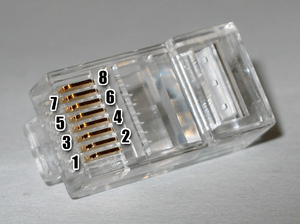
| Pin | Pair | Wire[lower-alpha 4] | Color |
|---|---|---|---|
| 1 | 3 | tip | |
| 2 | 3 | ring | |
| 3 | 2 | tip | |
| 4 | 1 | ring | |
| 5 | 1 | tip | |
| 6 | 2 | ring | |
| 7 | 4 | tip | |
| 8 | 4 | ring |
| Pin | Pair | Wire[lower-alpha 4] | Color |
|---|---|---|---|
| 1 | 2 | tip | |
| 2 | 2 | ring | |
| 3 | 3 | tip | |
| 4 | 1 | ring | |
| 5 | 1 | tip | |
| 6 | 3 | ring | |
| 7 | 4 | tip | |
| 8 | 4 | ring |
Most Ethernet cables are wired "straight-through" (pin 1 to pin 1, pin 2 to pin 2 and so on). In some instances the "crossover" form (receive to transmit and transmit to receive) may still be required.
Cables for Ethernet may be wired to either the T568A or T568B termination standards at both ends of the cable. Since these standards differ only in that they swap the positions of the two pairs used for transmitting and receiving, a cable with T568A wiring at one end and T568B wiring at the other results in a crossover cable.
A 10BASE-T or 100BASE-TX host uses a connector wiring called medium dependent interfaces (MDI), transmitting on pins 1 and 2 and receiving on pins 3 and 6 to a network device. An infrastructure node (a hub or a switch) accordingly uses a connector wiring called MDI-X, transmitting on pins 3 and 6 and receiving on pins 1 and 2. These ports are connected using a straight-through cable so each transmitter talks to the receiver on the other end of the cable.
Nodes can have two types of ports: MDI (uplink port) or MDI-X (regular port, 'X' for internal crossover). Hubs and switches have regular ports. Routers, servers and end hosts (e.g. personal computers) have uplink ports. When two nodes having the same type of ports need to be connected, a crossover cable may be required, especially for older equipment. Connecting nodes having different type of ports (i.e. MDI to MDI-X and vice versa) requires straight-through cable. Thus connecting an end host to a hub or switch requires a straight-through cable. Some older switches and hubs provided a button to allow a port to act as either a normal (regular) or an uplink port, i.e. using MDI-X or MDI pinout respectively.
Many modern Ethernet host adapters can automatically detect another computer connected with a straight-through cable and then automatically introduce the required crossover, if needed; if neither of the adapters has this capability, then a crossover cable is required. Most newer switches have auto MDI-X on all ports allowing all connections to be made with straight-through cables. If both devices being connected support 1000BASE-T according to the standards, they will connect regardless of whether a straight-through or crossover cable is used.[9]
A 10BASE-T transmitter sends two differential voltages, +2.5 V or −2.5 V. A 100BASE-TX transmitter sends three differential voltages, +1 V, 0 V, or −1 V.[10] Unlike earlier Ethernet standards using broadband and coaxial cable, such as 10BASE5 (thicknet) and 10BASE2 (thinnet), 10BASE-T does not specify the exact type of wiring to be used, but instead specifies certain characteristics that a cable must meet. This was done in anticipation of using 10BASE-T in existing twisted-pair wiring systems that did not conform to any specified wiring standard. Some of the specified characteristics are attenuation, characteristic impedance, timing jitter, propagation delay, and several types of noise and crosstalk. Cable testers are widely available to check these parameters to determine if a cable can be used with 10BASE-T. These characteristics are expected to be met by 100 meters of 24-gauge unshielded twisted-pair cable. However, with high quality cabling, reliable cable runs of 150 meters or longer are often achievable and are considered viable by technicians familiar with the 10BASE-T specification.
100BASE-TX follows the same wiring patterns as 10BASE-T, but is more sensitive to wire quality and length, due to the higher bit rates.
1000BASE-T uses all four pairs bi-directionally using hybrid circuits and cancellers.[11] Data is encoded using 4D-PAM5; four dimensions using PAM (pulse amplitude modulation) with five voltages, −2 V, −1 V, 0 V, +1 V, and +2 V.[12] While +2 V to −2 V may appear at the pins of the line driver, the voltage on the cable is nominally +1 V, +0.5 V, 0 V, −0.5 V and −1 V.[13]
100BASE-TX and 1000BASE-T were both designed to require a minimum of category 5 cable and also specify a maximum cable length of 100 metres (330 ft). Category 5 cable has since been deprecated and new installations use category 5e.
Shared cable
10BASE-T and 100BASE-TX require only two pairs (pins 1–2, 3–6) to operate. Since common category 5 cable has four pairs, it is possible to use the spare pairs (pins 4–5, 7–8) in 10- and 100-Mbit/s configurations for other purposes. The spare pairs may be used for power over Ethernet (PoE), for two plain old telephone service (POTS) lines, or for a second 10BASE-T or 100BASE-TX connection. In practice, great care must be taken to separate these pairs as 10/100-Mbit/s Ethernet equipment electrically terminates the unused pins. Shared cable is not an option for Gigabit Ethernet as 1000BASE-T requires all four pairs to operate.
Single-pair
In addition to the more computer-oriented two and four-pair variants, the 100BASE-T1 and 1000BASE-T1 single-pair Ethernet PHYs are intended for automotive applications[14] or as optional data channels in other interconnect applications.[15] The single pair operates at full duplex and has a maximum reach of 15 m or 49 ft (100BASE-T1, 1000BASE-T1 link segment type A) or up to 40 m or 130 ft (1000BASE-T1 link segment type B) with up to four in-line connectors. Both PHYs require a balanced twisted pair with an impedance of 100 Ω. The cable must be capable of transmitting 600 MHz for 1000BASE-T1 and 66 MHz for 100BASE-T1.
Similar to PoE, Power over Data Lines (PoDL) can provide up to 50 W to a device.[16]
Autonegotiation and duplex
Ethernet over twisted pair standards up through Gigabit Ethernet define both full-duplex and half-duplex communication. However, half-duplex operation for gigabit speed is not supported by any existing hardware.[17][18] Higher speed standards, 2.5GBASE-T up to 40GBASE-T[19] running at 2.5 to 40 Gbit/s, consequently define only full-duplex point-to-point links which are generally connected by network switches, and do not support the traditional shared-medium CSMA/CD operation.[20]
Many different modes of operations (10BASE-T half duplex, 10BASE-T full duplex, 100BASE-TX half duplex, etc.) exist for Ethernet over twisted pair, and most network adapters are capable of different modes of operation. Autonegotiation is required in order to make a working 1000BASE-T connection.
When two linked interfaces are set to different duplex modes, the effect of this duplex mismatch is a network that functions much more slowly than its nominal speed. Duplex mismatch may be inadvertently caused when an administrator configures an interface to a fixed mode (e.g. 100 Mbit/s full duplex) and fails to configure the remote interface, leaving it set to autonegotiate. Then, when the autonegotiation process fails, half duplex is assumed by the autonegotiating side of the link.
Variants
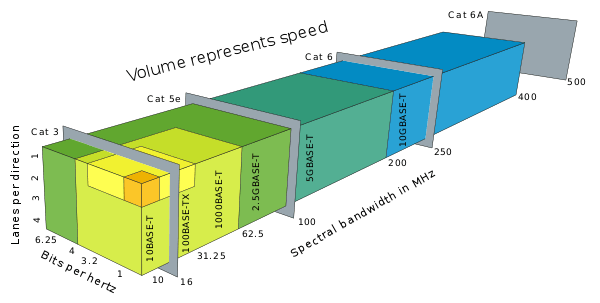
| Name | Standard | Status | Speed (Mbit/s)[upper-alpha 1] | Pairs required | Lanes per direction | Bits per hertz[upper-alpha 2] | Line code | Symbol rate per lane (MBd) | Bandwidth[upper-alpha 3] (MHz) | Max distance (m) | Cable[upper-alpha 4] | Cable rating (MHz) | Usage |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| StarLAN-1 1BASE5 | 802.3e-1987 | obsolete | 1 | 2 | 1 | 1 | PE | 1 | 1 | 250 | voice grade | ~12 | LAN |
| StarLAN-10 | 802.3e-1988 | obsolete | 10 | 2 | 1 | 1 | PE | 10 | 10 | ~100 | voice grade | ~12 | LAN |
| LattisNet | pre 802.3i-1990 | obsolete | 10 | 2 | 1 | 1 | PE | 10 | 10 | 100 | voice grade | ~12 | LAN |
| 10BASE-T | 802.3i-1990 (CL14) | legacy | 10 | 2 | 1 | 1 | PE | 10 | 10 | 100 | Cat 3 | 16 | LAN [22] |
| 10BASE-T1S | 802.3cg-2019 | planned | 10 | 1 | 1 | ? | ? | ? | ? | 15 | ? | ? | Automotive, IoT, M2M |
| 10BASE-T1L | 802.3cg-2019 | planned | 10 | 1 | 1 | ? | ? | ? | ? | 1000 | ? | ? | Automotive, IoT, M2M |
| 100BASE-T1 | 802.3bw-2015 (CL96) | current | 100 | 1 | 1 | 2.66 | PAM-3 4B/3B | 75 | 37.5 | 15 | Cat 5e | 100 | Automotive, IoT, M2M |
| 100BASE-T2 | 802.3y-1997 | obsolete | 100 | 2 | 2 | 4 | LFSR PAM-5 | 25 | 12.5 | 100 | Cat 3 | 16 | Market failure |
| 100BASE-T4 | 802.3u-1995 | obsolete | 100 | 4 | 3 | 2.66 | 8B6T PAM-3 Half-duplex only | 25 | 12.5 | 100 | Cat 3 | 16 | Market failure |
| 100BaseVG | 802.12-1995 | obsolete | 100 | 4 | 4 | 1.66 | 5B6B Half-duplex only | 30 | 15 | 100 | Cat 3 | 16 | Market failure |
| 100BASE-TX | 802.3u-1995 | current | 100 | 2 | 1 | 3.2 | 4B5B MLT-3 NRZ-I | 125 | 31.25 | 100 | Cat 5 | 100 | LAN |
| 1000BASE‑T | 802.3ab-1999 (CL40) | current | 1000 | 4 | 4 | 4 | TCM 4D-PAM-5 | 125 | 62.5 | 100 | Cat 5 | 100 | LAN |
| 1000BASE‑TX | TIA/EIA-854 (2001) | obsolete | 1000 | 4 | 2 | 4 | PAM-5 | 250 | 125 | 100 | Cat 6 | 250 | Market failure |
| 1000BASE-T1 | 802.3bp-2016 | current | 1000 | 1 | 1 | 2.66 | PAM-3 80B/81B RS-FEC | 750 | 375 | 40 | Cat 6A | 500 | Automotive, IoT, M2M |
| 2.5GBASE-T | 802.3bz-2016 | current | 2500 | 4 | 4 | 6.25 | 64B65B PAM-16 128-DSQ | 200 | 100 | 100 | Cat 5e | 100 | LAN |
| 5GBASE-T | 802.3bz-2016 | current | 5000 | 4 | 4 | 6.25 | 64B65B PAM-16 128-DSQ | 400 | 200 | 100 | Cat 6 | 250 | LAN |
| 10GBASE-T | 802.3an-2006 | current | 10000 | 4 | 4 | 6.25 | 64B65B PAM-16 128-DSQ | 800 | 400 | 100 | Cat 6A | 500 | LAN |
| 25GBASE-T | 802.3bq-2016 (CL113) | current | 25000 | 4 | 4 | 6.25 | PAM-16 RS-FEC (192, 186) LDPC | 2000 | 1000 | 30 | Cat 8 | 2000 | Data centres |
| 40GBASE-T | 802.3bq-2016 (CL113) | current | 40000 | 4 | 4 | 6.25 | PAM-16 RS-FEC (192, 186) LDPC | 3200 | 1600 | 30 | Cat 8 | 2000 | Data centres |
- Transfer speed = lanes × bits per hertz × spectral bandwidth
- Effective bits per hertz per lane after loss to encoding overhead
- The spectral bandwidth is the maximum rate at which the signal will complete one hertz cycle. It is typically half the symbol rate, because one can send a symbol both at the positive and negative peak of the cycle. Exceptions are 10BASE-T where it is equal because it uses Manchester code, and 100BASE-TX where it is one quarter because it uses MLT-3 encoding.
- At shorter cable length, it is possible to use cables of a lower grade than required for 100 m. For example it is possible to use 10GBASE-T on a Cat 6 cable of 55 m or less. Likewise 5GBASE-T is expected to work with Cat 5e in most use cases.
Notes
- Generally, the higher-speed implementations support the lower-speed standards making it possible to mix different generations of equipment; with the inclusive capability designated 10/100 or 10/100/1000 for connections that support such combinations.[1]:123
- The 8P8C modular connector is often called RJ45 after a telephone industry standard.
- By switching link beat on or off, a number of network interface cards at the time could work with either StarLAN 10 or 10BASE-T.[7]
- The terms used in the explanations of the 568 standards, tip and ring, refer to older communication technologies, and equate to the positive and negative parts of the connections.
References
- Charles E. Spurgeon (2000). Ethernet: the definitive guide. OReilly Media. ISBN 978-1-56592-660-8.
- Urs von Burg (2001). The triumph of Ethernet: technological communities and the battle for the LAN standard. Stanford University Press. pp. 175–176, 255–256. ISBN 978-0-8047-4095-1.
- Paula Musich (August 3, 1987). "User lauds SynOptic system: LattisNet a success on PDS". Network World. 4 (31). pp. 2, 39. Retrieved June 10, 2011.
- W.C. Wise, Ph.D. (March 1989). "Yesterday, somebody asked me what I think about LattisNet. Here's what I told him in a nutshell". CIO Magazine. 2 (6). p. 13. Retrieved June 11, 2011. (Advertisement)
- Network Maintenance and Troubleshooting Guide. Fluke Networks. 2002. p. B-4. ISBN 1-58713-800-X.
- StarLAN Technology Report, 4th Edition. Architecture Technology Corporation. 1991. ISBN 9781483285054.
- Ohland, Louis. "3Com 3C523". Walsh Computer Technology. Retrieved 1 April 2015.
- IEEE 802.3 1.2.3 Physical Layer and media notation
- IEEE 802.3 40.1.4 Signaling
- David A. Weston (2001). Electromagnetic Compatibility: principles and applications. CRC Press. pp. 240–242. ISBN 0-8247-8889-3. Retrieved June 11, 2011.
- IEEE 802.3 40.1.3 Operation of 1000BASE-T
- Steve Prior. "1000BASE-T Duffer's Guide to Basics and Startup" (PDF). Retrieved 2011-02-18.
- Nick van Bavel, Phil Callahan and John Chiang (2004-10-25). "Voltage-mode line drivers save on power". Retrieved 2011-02-18.
- New 802.3bw Ethernet Auto Standard Leaves LVDS Cables in the Dust
- IEEE 802.3bw Clause 96 and 802.3bp Clause 97
- IEEE 802.3bu-2016 104. Power over Data Lines (PoDL) of Single Balanced Twisted-Pair Ethernet
- Seifert, Rich (1998). "10". Gigabit Ethernet: Technology and Applications for High-Speed LANs. Addison Wesley. ISBN 0-201-18553-9.
- "Configuring and Troubleshooting Ethernet 10/100/1000Mb Half/Full Duplex Auto-Negotiation". Cisco. 2009-10-28. Retrieved 2015-02-15.
- "IEEE P802.3bq 40GBASE-T Task Force". IEEE 802.3.
- Michael Palmer (2012-06-21). Hands-On Networking Fundamentals, 2nd ed. Cengage Learning. p. 180. ISBN 978-1-285-40275-8.
- Charles E. Spurgeon (2014). Ethernet: The Definitive Guide (2nd ed.). O'Reilly Media. ISBN 978-1-4493-6184-6.
- "Introduction To Fast Ethernet" (PDF). Contemporary Control Systems, Inc. 2001-11-01. Retrieved 2018-08-25.
External links
Ethernet family of local area network technologies | |
|---|---|
| Speeds | |
| General | |
| Organizations | |
| Media | |
| Historic | |
| Applications | |
| Transceivers | |
| Interfaces | |
| |