Python
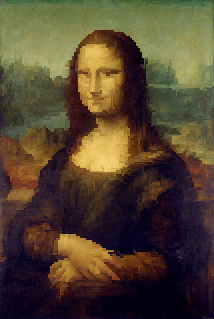
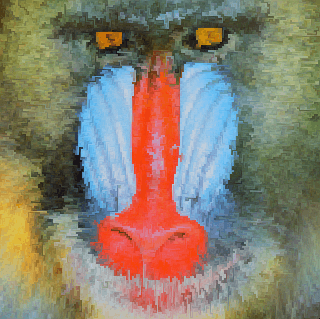
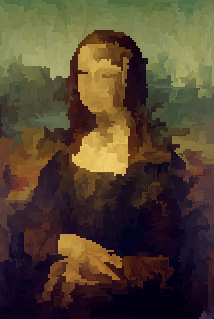
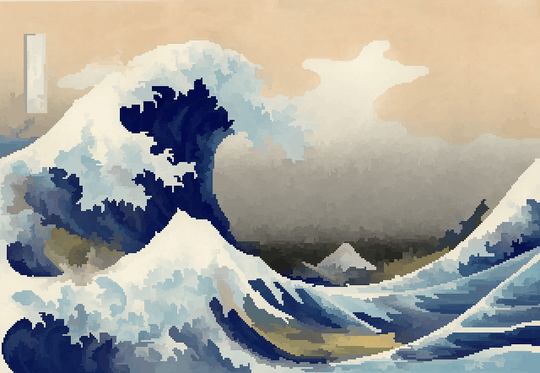
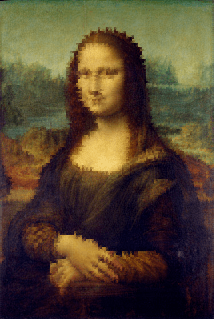
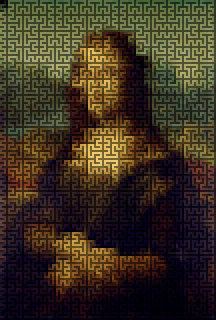
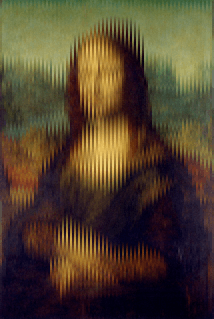
I generate a dynamic path to minimize the color changes as the snake travels. Here are some images:
tolerance = 0.01
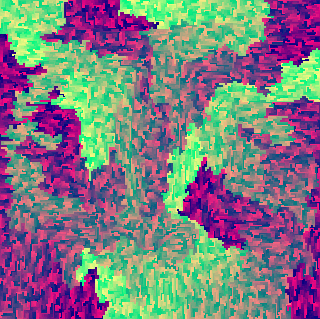
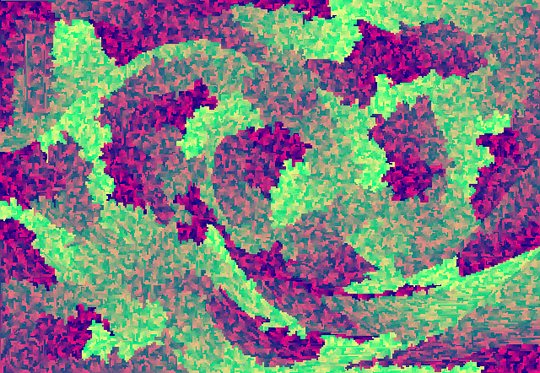
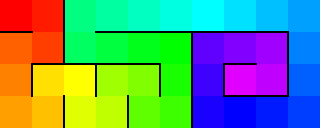
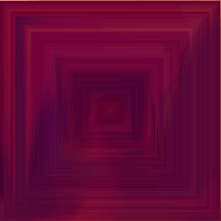
Cyclic color paths for the above images (blue to red, getting greener as it repeats):

The path is generated by starting with some initial path, then adding 2x2 loops onto it until the image is filled. The advantage of this method is that the loops can be added anywhere on the path, so you can't paint yourself into a corner and have more freedom to build the path you want. I keep track of the possible loops adjacent to the current path and store them in a heap, weighted by the color change along the loop. I then pop off the loop with the least color change and add it to the path, and repeat until the image is filled.
I actually track the loops alone ('DetourBlock' in the code), then reconstruct the path; this was a mistake as there are some special cases for odd width/height and I spent several hours debugging the reconstruction method. Oh well.
The path generation metric needs tuning and I also have an idea for better colorization, but I thought I'd get this out first since it works quite well. Except for this one, which seems better in some of the fixed paths:

Here's the Python code, with apologies for my atrocious coding habits:
# snakedraw.py
# Image library: Pillow
# Would like to animate with matplotlib... (dependencies dateutil, six)
import heapq
from math import pow, sqrt, log
from PIL import Image
tolerance = 0.001
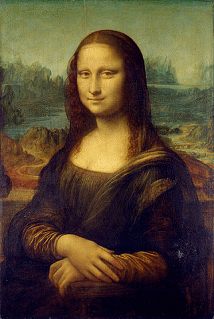
imageList = [ "lena.png", "MonaLisa.png", "Mandrill.png", "smallGreatWave.png", "largeGreatWave.png", "random.png"]
# A useful container to sort objects associated with a floating point value
class SortContainer:
def __init__(self, value, obj):
self.fvalue = float(value)
self.obj = obj
def __float__(self):
return float(self.fvalue)
def __lt__(self, other):
return self.fvalue < float(other)
def __eq__(self, other):
return self.fvalue == float(other)
def __gt__(self, other):
return self.fvalue > float(other)
# Directional constants and rotation functions
offsets = [ (1,0), (0,1), (-1,0), (0,-1) ] # RULD, in CCW order
R, U, L, D = 0, 1, 2, 3
def d90ccw(i):
return (i+1) % 4
def d180(i):
return (i+2) % 4
def d90cw(i):
return (i+3) % 4
def direction(dx, dy):
return offsets.index((dx,dy))
# Standard color metric: Euclidean distance in the RGB cube. Distance between opposite corners normalized to 1.
pixelMax = 255
cChannels = 3
def colorMetric(p):
return sqrt(sum([ pow(p[i],2) for i in range(cChannels)])/cChannels)/pixelMax
def colorDistance(p1,p2):
return colorMetric( [ p1[i]-p2[i] for i in range(cChannels) ] )
# Contains the structure of the path
class DetourBlock:
def __init__(self, parent, x, y):
assert(x%2==0 and y%2==0)
self.x = x
self.y = y
self.parent = None
self.neighbors = [None, None, None, None]
def getdir(A, B):
dx = (B.x - A.x)//2
dy = (B.y - A.y)//2
return direction(dx, dy)
class ImageTracer:
def __init__(self, imgName):
self.imgName = imgName
img = Image.open(imgName)
img = img.convert(mode="RGB") # needed for BW images
self.srcImg = [ [ [ float(c) for c in img.getpixel( (x,y) ) ] for y in range(img.size[1]) ] for x in range(img.size[0])]
self.srcX = img.size[0]
self.srcY = img.size[1]
# Set up infrastructure
self.DetourGrid = [ [ DetourBlock(None, 2*x, 2*y) \
for y in range((self.srcY+1)//2)] \
for x in range((self.srcX+1)//2)]
self.dgX = len(self.DetourGrid)
self.dgY = len(self.DetourGrid[0])
self.DetourOptions = list() # heap!
self.DetourStart = None
self.initPath()
def initPath(self):
print("Initializing")
if not self.srcX%2 and not self.srcY%2:
self.AssignToPath(None, self.DetourGrid[0][0])
self.DetourStart = self.DetourGrid[0][0]
lastDB = None
if self.srcX%2: # right edge initial path
self.DetourStart = self.DetourGrid[-1][0]
for i in range(self.dgY):
nextDB = self.DetourGrid[-1][i]
self.AssignToPath(lastDB, nextDB)
lastDB = nextDB
if self.srcY%2: # bottom edge initial path
if not self.srcX%2:
self.DetourStart = self.DetourGrid[-1][-1]
for i in reversed(range(self.dgX-(self.srcX%2))): # loop condition keeps the path contiguous and won't add corner again
nextDB = self.DetourGrid[i][-1]
self.AssignToPath(lastDB, nextDB)
lastDB = nextDB
# When DetourBlock A has an exposed side that can potentially detour into DetourBlock B,
# this is used to calculate a heuristic weight. Lower weights are better, they minimize the color distance
# between pixels connected by the snake path
def CostBlock(self, A, B):
# Weight the block detour based on [connections made - connections broken]
dx = (B.x - A.x)//2
dy = (B.y - A.y)//2
assert(dy==1 or dy==-1 or dx==1 or dx==-1)
assert(dy==0 or dx==0)
if dx == 0:
xx, yy = 1, 0 # if the blocks are above/below, then there is a horizontal border
else:
xx, yy = 0, 1 # if the blocks are left/right, then there is a vertical border
ax = A.x + (dx+1)//2
ay = A.y + (dy+1)//2
bx = B.x + (1-dx)//2
by = B.y + (1-dy)//2
fmtImg = self.srcImg
''' Does not work well compared to the method below
return ( colorDistance(fmtImg[ax][ay], fmtImg[bx][by]) + # Path connects A and B pixels
colorDistance(fmtImg[ax+xx][ay+yy], fmtImg[bx+xx][by+yy]) # Path loops back from B to A eventually through another pixel
- colorDistance(fmtImg[ax][ay], fmtImg[ax+xx][ay+yy]) # Two pixels of A are no longer connected if we detour
- colorDistance(fmtImg[bx][by], fmtImg[bx+xx][by+yy]) ) # Two pixels of B can't be connected if we make this detour
'''
return ( colorDistance(fmtImg[ax][ay], fmtImg[bx][by]) + # Path connects A and B pixels
colorDistance(fmtImg[ax+xx][ay+yy], fmtImg[bx+xx][by+yy])) # Path loops back from B to A eventually through another pixel
# Adds a detour to the path (really via child link), and adds the newly adjacent blocks to the potential detour list
def AssignToPath(self, parent, child):
child.parent = parent
if parent is not None:
d = parent.getdir(child)
parent.neighbors[d] = child
child.neighbors[d180(d)] = parent
for (i,j) in offsets:
x = int(child.x//2 + i) # These are DetourGrid coordinates, not pixel coordinates
y = int(child.y//2 + j)
if x < 0 or x >= self.dgX-(self.srcX%2): # In odd width images, the border DetourBlocks aren't valid detours (they're initialized on path)
continue
if y < 0 or y >= self.dgY-(self.srcY%2):
continue
neighbor = self.DetourGrid[x][y]
if neighbor.parent is None:
heapq.heappush(self.DetourOptions, SortContainer(self.CostBlock(child, neighbor), (child, neighbor)) )
def BuildDetours(self):
# Create the initial path - depends on odd/even dimensions
print("Building detours")
dbImage = Image.new("RGB", (self.dgX, self.dgY), 0)
# We already have our initial queue of detour choices. Make the best choice and repeat until the whole path is built.
while len(self.DetourOptions) > 0:
sc = heapq.heappop(self.DetourOptions) # Pop the path choice with lowest cost
parent, child = sc.obj
if child.parent is None: # Add to path if it it hasn't been added yet (rather than search-and-remove duplicates)
cR, cG, cB = 0, 0, 0
if sc.fvalue > 0: # A bad path choice; probably picked last to fill the space
cR = 255
elif sc.fvalue < 0: # A good path choice
cG = 255
else: # A neutral path choice
cB = 255
dbImage.putpixel( (child.x//2,child.y//2), (cR, cG, cB) )
self.AssignToPath(parent, child)
dbImage.save("choices_" + self.imgName)
# Reconstructing the path was a bad idea. Countless hard-to-find bugs!
def ReconstructSnake(self):
# Build snake from the DetourBlocks.
print("Reconstructing path")
self.path = []
xi,yi,d = self.DetourStart.x, self.DetourStart.y, U # good start? Okay as long as CCW
x,y = xi,yi
while True:
self.path.append((x,y))
db = self.DetourGrid[x//2][y//2] # What block do we occupy?
if db.neighbors[d90ccw(d)] is None: # Is there a detour on my right? (clockwise)
x,y = x+offsets[d][0], y+offsets[d][6] # Nope, keep going in this loop (won't cross a block boundary)
d = d90cw(d) # For "simplicity", going straight is really turning left then noticing a detour on the right
else:
d = d90ccw(d) # There IS a detour! Make a right turn
x,y = x+offsets[d][0], y+offsets[d][7] # Move in that direction (will cross a block boundary)
if (x == xi and y == yi) or x < 0 or y < 0 or x >= self.srcX or y >= self.srcY: # Back to the starting point! We're done!
break
print("Retracing path length =", len(self.path)) # should = Width * Height
# Trace the actual snake path
pathImage = Image.new("RGB", (self.srcX, self.srcY), 0)
cR, cG, cB = 0,0,128
for (x,y) in self.path:
if x >= self.srcX or y >= self.srcY:
break
if pathImage.getpixel((x,y)) != (0,0,0):
print("LOOPBACK!", x, y)
pathImage.putpixel( (x,y), (cR, cG, cB) )
cR = (cR + 2) % pixelMax
if cR == 0:
cG = (cG + 4) % pixelMax
pathImage.save("path_" + self.imgName)
def ColorizeSnake(self):
#Simple colorization of path
traceImage = Image.new("RGB", (self.srcX, self.srcY), 0)
print("Colorizing path")
color = ()
lastcolor = self.srcImg[self.path[0][0]][self.path[0][8]]
for i in range(len(self.path)):
v = [ self.srcImg[self.path[i][0]][self.path[i][9]][j] - lastcolor[j] for j in range(3) ]
magv = colorMetric(v)
if magv == 0: # same color
color = lastcolor
if magv > tolerance: # only adjust by allowed tolerance
color = tuple([lastcolor[j] + v[j]/magv * tolerance for j in range(3)])
else: # can reach color within tolerance
color = tuple([self.srcImg[self.path[i][0]][self.path[i][10]][j] for j in range(3)])
lastcolor = color
traceImage.putpixel( (self.path[i][0], self.path[i][11]), tuple([int(color[j]) for j in range(3)]) )
traceImage.save("snaked_" + self.imgName)
for imgName in imageList:
it = ImageTracer(imgName)
it.BuildDetours()
it.ReconstructSnake()
it.ColorizeSnake()
And some more images at a very low tolerance of 0.001:
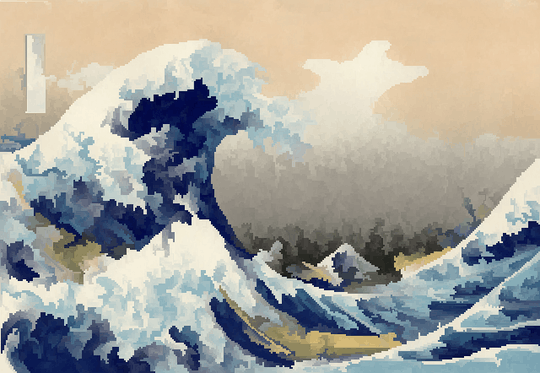

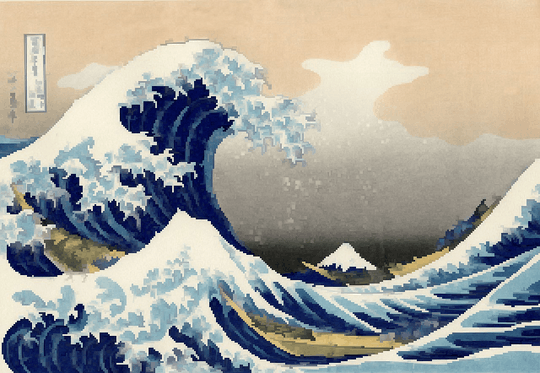
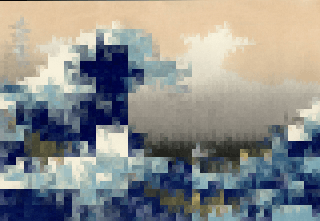
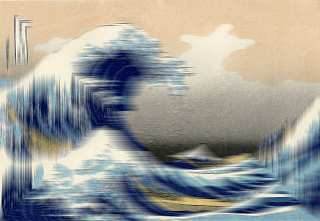
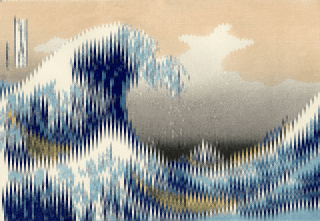
And also the great wave path because it's neat:
EDIT
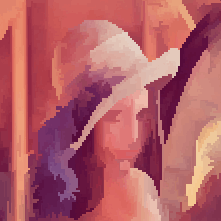
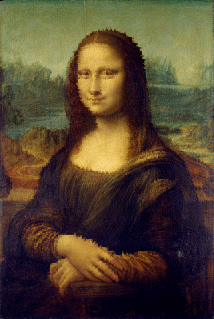
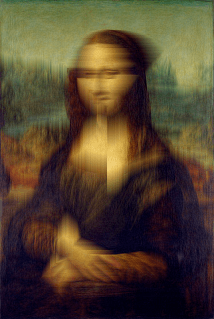
The path generation seems better when minimizing the color distance between the average colors of adjacent blocks, rather than minimizing the sum of the color distances between their adjacent pixels. Also, it turns out you can average the colors of any two tolerance-compliant snake paths and end up with another tolerance-compliant snake path. So I traverse the path both ways and average them, which smooths out a lot of the artifacts. Zombie Lena and Scary Hands Mona look much better. Final versions:
Tolerance 0.01:


Tolerance 0.001:




















14Seriously, how did you manage to post 14 really decent challenges (one of which is now the third best ever) in 16 days without ever sandboxing one of them? Big kudos, PPCG needs more people like you! ;) – Martin Ender – 2014-07-23T08:06:14.483
@MartinBüttner Not sure. They just come naturally to me :) To be fair the one question I did sandbox was not received too well: http://meta.codegolf.stackexchange.com/a/1820/26997
– Calvin's Hobbies – 2014-07-23T08:14:10.427I'm not sure whether my solution is stuck in an infinite loop, or it's just taking a really, really long time. And it's only an 80x80 image! – Doorknob – 2014-07-23T12:11:17.937
1Oh my...this looks REALLY fun. – cjfaure – 2014-07-23T19:39:27.757
The existence of a Hamiltonian path within tolerance is not guaranteed in general ... – Dr. belisarius – 2014-07-23T22:59:34.260
@belisarius I'm not sure I understand your point. The fact that a Hamiltonian path may not exist within tolerance is fine. The goal is to create a realistic path. It need not be perfect. – Calvin's Hobbies – 2014-07-23T23:59:26.710
@Calvin'sHobbies It seems (based on your answer) that I misinterpreted the question. You're setting the "next pixel" color to something within the tolerance range, while I understood that we should find a path that simultaneously runs within the tolerance and returns the original image. – Dr. belisarius – 2014-07-24T02:14:37.543
1@belisarius I don't think it's required to be exactly the original image, just as close a replica as possible. – Οurous – 2014-07-24T06:00:58.817